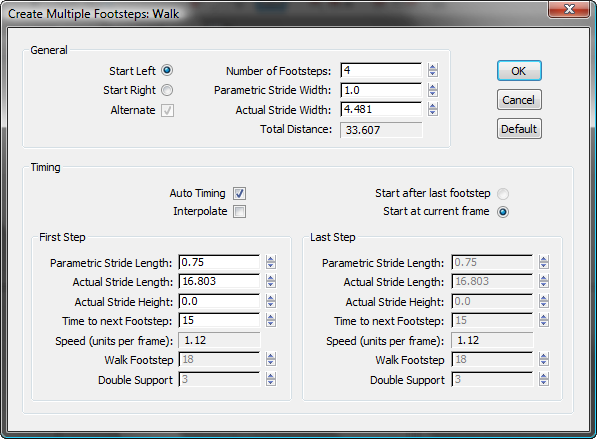
The Create Multiple Footsteps dialog for the walk gait creates a sequence of walking footsteps using a series of parameters.
 This dialog displays when you select the Walk gait on the Motion panel's Footstep Creation rollout, then click Create Multiple
Footsteps.
This dialog displays when you select the Walk gait on the Motion panel's Footstep Creation rollout, then click Create Multiple
Footsteps.
To make the biped walk up or down stairs:
To make the biped walk in place:
To make the biped walk backward:
The absolute value of the Parametric Stride Length is still the length of the stride.
Sets the stride width as a percentage of the pelvis width. A value of 1.0 produces a stride width equal to the pelvis width. A value of 3.0 produces a wide, waddling stride. Changes to this setting automatically change the Actual Stride Width.
Parametric describes the parameter in terms of biped anatomy, and Actual describes the value in 3ds Max units.
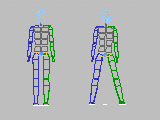
Stride Width=1 and Stride Width=3
Sets timing parameters automatically. Auto Timing affects the following timing parameters for the Walk gait:
When Auto Timing is selected, these parameters are automatically adjusted to reasonable values. Control the footstep sequence by adjusting the Stride Length and Time To Next Footstep parameters.
When Auto Timing is off, you can control the footstep sequence by adjusting the gait timing parameters, but you can't change the Time To Next Footstep parameter.
Control acceleration or deceleration of the series of footsteps. When this box is selected, a second set of step parameters under Last Step is enabled.
Biped creates footsteps starting with the values of the parameters under First Step and ending with the values of the parameters under Last Step.
By interpolating between the two, Biped produces a footstep series that changes over time.
When Interpolate is cleared, the Last Step parameters are grayed out. Biped creates all the footsteps using only the parameters under First Step.
First Step and Last Step groups
Sets the stride length for the new footsteps as a percentage of the length of the biped’s leg. The default value of 0.75 gives an average stride of normal proportions.
A value of 1.0 will produce a stride length equal to the leg length, which makes the biped stretch slightly to reach the next step. A value of 0.0 will make the biped walk in place. A negative stride length will make the biped walk backwards.
When a biped walks backwards, it does not simply reverse the forward movement but maintains the correct foot-state sequence with the toe touching the ground first, followed by the heel.
Adjusting Parametric Stride Length automatically changes the value for Actual Stride Length.
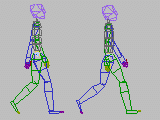
Stride Length=0.75 and Stride Length=1
Sets the rise or fall between footsteps. You can use this parameter to create a set of footsteps going up or down a slope or a stairway.
The value for Actual Stride Height is the difference in height in units between each of the new footsteps. Positive values step up and negative values step down.
Stride Height=5 units
Displays the number of units the biped will move per frame. It changes in response to changes in the other parameters but cannot be adjusted directly.
The following two parameters are only enabled when Auto Timing is off.
You can use these parameters instead of Auto Timing to control the speed of the forward motion over the series of footsteps. However, because these parameters both affect the footsteps’ time in contact with the ground, using them to slow down a walk gives the walk a hesitant, ‘stop-go’ quality.
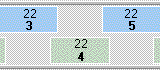
Specifies the number of frames both feet will be on the ground at the same time during a walk.
The higher the number, the longer the period during which both feet remain in contact with the ground during each walk cycle and, consequently, the slower the speed of the walking motion.

The dotted line surrounds the double-support period (6 frames)








 Motion Panel
Motion Panel  (Footstep Mode)
(Footstep Mode)  (Create Multiple Footsteps)
(Create Multiple Footsteps)