Command entry:
Command entry: 
Create panel


(Helpers)
Object Type rollout
Delegate
Motion Parameters rollout
Command entry:Select a Delegate object.

Modify panel
Motion Parameters rollout
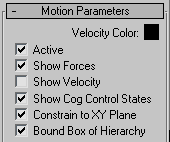
The Motion Parameters rollout lets you specify a Delegate object's characteristics, including speed, acceleration, and other
factors. It also lets you associate the delegate with a biped.
ImportantWhen using delegates with bipeds, only the settings in the Biped group have any effect in the simulation, because Biped gets
all its speed and turning information from motion flow clips and behaviors.
Interface
- Velocity Color
-
When Show Velocity is on, uses the specified color to draw a vector in the delegate's center during the simulation solution.
The vector length indicates the delegate's relative speed. Default=black.
- Active
-
The delegate object is subject to control by a Crowd object. Default=on.
- Show Forces
-
The forces being applied to a delegate by any applicable behaviors are drawn as vectors whose length indicates the extent
of the forces and whose orientation shows the direction in which the behavior is influencing the delegate to move. Default=on.
For example, if the delegate is affected by a Space Warp behavior and a Wander behavior, the vectors (using default colors) are yellow and blue-green, respectively. These vectors are visible only during solution
of the crowd simulation.
- Show Velocity
-
Uses the Velocity Color (see above) to draw a vector whose length depicts the delegate's relative speed. This vector is visible
only during the solution of the crowd simulation. Default=off.
- Show Cog Control States
-
During a solution, a text label appears next to the delegate showing the name of the cognitive controller state or transition that currently directs its behavior, if any. Default=on.
- Constrain to XY Plane
-
The delegate remains at its initial height (position on the world Z axis) throughout the simulation. When off, the delegate's
height can change during the simulation, for example when seeking an object at a different height. Default=on.
- Bound Box of Hierarchy
-
When on, the Avoid behavior uses the bounding box of the delegate and all of its children to perform its behavior. Default=on.
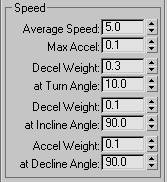
Speed group
- Average Speed
-
Specifies the delegate's baseline velocity in 3ds Max units (or the current unit type) per frame. Default=5.0.
The delegate's speed can be modified during the simulation by a variety of factors, such as a linked biped's built-in speed
and Deviation settings in a behavior.
- Max Accel(eration)
-
Multiplied times Average Speed to determine the maximum acceleration. Default=0.1.
For example, given the defaults of 5.0 for Average Speed and 0.1 for Max Accel, the acceleration or deceleration at any moment
can be no greater than 0.5 units/frame/frame.
- Decel(eration) Weight
-
Specifies how much a delegate should slow down when turning.
The higher this setting, the more the delegate slows down when it reaches the turn angle (see following parameter). A value
of 0 specifies no slowdown; a value of 1 tells the delegate to stop. Default=0.3.
The algorithm computes a value, d, which goes linearly from 0 to (1 - Decel Weight) as the turn angle of the delegate goes
from 0 to the Turn Angle specified by the user. The speed of the delegate is then multiplied by d. For example, when the delegate
turns at the Turn Angle or greater, its speed will be multiplied by (1 - Decel Weight), slowing it down as much as possible
based on this parameter. When the delegate is not turning at all, its speed is not affected by the Decel Weight. When the
delegate is turning at half the specified Turn Angle, d = Decel Weight / 2, so its speed will be multiplied by (1 - Decel
Weight / 2).
As a practical example, take a delegate traveling at 10 units/frame. Decel Weight is set to 0.4, and At Turn Angle is set
to 30. When the delegate has turned 15 degrees (half the At Turn Angle), the effective deceleration weight is 0.2. Subtract
that quantity from 1 to get 0.8, and then multiply that times the delegate's speed to get 8 units per second halfway into
the turn. At the full turn (30 degrees), the delegate travels at 6 units per frame.
- At Turn Angle
-
Specifies the turn angle at which Decel Weight's full slowdown effect is applied. Default=10.0.
If the current turn angle is less than At Turn Angle, the algorithm divides the latter by the former, and then divides the
Decel Weight setting by the result to derive the effective deceleration weight.
- Decel(eration) Weight
-
Specifies how much the delegate should slow down when moving at an upward slant. Default=0.1.
See Decel Weight for a full explanation.
- At Incline Angle
-
Specifies the upward slant angle at which Decel Weight's full slowdown effect is applied. Default=90.0.
- Accel(eration) Weight
-
Specifies how much the delegate should speed up when moving at a downward slant. Default=0.1.
See Decel Weight for a full explanation, taking into account that Accel Weight produces a speedup effect rather than a slowdown. Thus, the
effective acceleration weight is added to 1, not subtracted from it.
- At Decline Angle
-
Specifies the downward slant angle at which Accel Weight's full speedup effect is applied. Default=90.0.
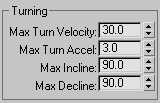
Turning group
These parameters affect the delegate's turning behavior; that is, how it changes direction in response to forces applied by
crowd behaviors.
You can use the Orientation behavior to affect how a delegate turns and banks, independently of the actual path taken.
Turning applies to objects moving both on the ground and in the air.
- Max Turn Velocity
-
Specifies the maximum number of degrees a delegate can turn per frame. Applies both to heading and pitch. Default=30.0.
- Max Turn Accel
-
Specifies how much the delegate's heading or pitch angle can change per frame. This controls angular acceleration and deceleration.
For smooth turns, keep it relatively low. Default=3.0.
TipIf a delegate exhibits sluggish turning behavior during a simulation, try increasing Max Turn Velocity, Max Turn Accel, or
both.
- Max Incline
-
Specifies the maximum number of degrees a delegate can turn upward at any given frame. For example, most birds can't fly straight
up, so you might set this to 45 for a bird. Default=90.0.
- Max Decline
-
Specifies the maximum number of degrees a delegate can turn downward at any given frame. Default=90.0.
For example, for a bird that can't fly straight up but can fly straight down, you might set to Max Incline to 45 and Max Decline to 90.
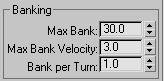
Banking group
These parameters affect the delegate's banking behavior; that is, how it tilts around its front-back axis as it changes direction
while moving. Banking typically applies to objects moving in the air or on water, but can also apply to ground-based objects
such as one- or two-wheeled vehicles.
- Max Bank
-
Specifies the maximum number of degrees a delegate can bank. Default=30.0.
- Max Bank Velocity
-
Specifies the maximum number of degrees a delegate can bank per frame. Default=3.0.
- Bank per Turn
-
The number of degrees the delegate will bank as a function of the turn angle at the current frame. For example, if Bank Per
Turn=1, the delegate will bank one degree for every degree it is turning at a given frame. Default=1.0.
Biped group
These parameters relate to the use of bipeds associated with delegates. In order to have a biped exhibit character animation
as it follows the delegate's course, you must use motion flow methods. For a procedure, see To use bipeds in a crowd simulation.
- Use Biped
-
Associates the delegate with a biped (specified with the None button), and causes the delegate's speed to be determined by
that of the biped's existing motion. Its behavior (for example, seeking another object) remains defined by a crowd object.
NoteThis button is not available until a biped is designated via the None button.
- None (label)
-
Click this button and then select a biped to be associated with the delegate's motion.
You can select a biped by clicking its center-of-mass object (for example, Bip001) in a viewport, or with the Pick Object dialog, which you can open by pressing H or by clicking the toolbar button Select By Name (you cannot use the Selection Floater). Thereafter, the name of the biped
object appears on the button.
TipWhen using the viewport, the mouse cursor changes to a crosshairs when positioned over a biped's center of mass.
- Start Frame
-
Specifies the frame at which the biped's first clip will begin to play.
If, when several bipeds share the same starting clip, you vary this setting per biped, they won't walk in lockstep formation.
This is most useful when you take advantage of the ability of the Edit Multiple Delegates dialog to randomize the start frame for each delegate.
- Priority
-
Sets the delegate priority, which determines the order of solution in biped/delegate simulations.
For details, see Priority Rollout.
- First clip choice method
-
Determines which motion clip in the shared motion flow graph Crowd initially uses to animate the biped linked with the delegate.
- Uses the first clip in the biped's motion flow script, if a script exists. If this option is chosen, but there is no script,
an error message is generated.
- Uses the random start clip or clips specified in the shared motion flow graph, if random start clips have been designated.
If this option is chosen, but no random start clips have been designated, an error message is generated.