







The inertial properties are the rigid body's mass/density and center of mass. The object's moment of inertia, which is the resistance of an object to angular acceleration, is how an object spins around its center of mass when dynamics are applied (forces and/or collisions). The moment of inertia is calculated on the bounding box of the rigid body according to its mass and how that mass is distributed relative to its center of mass.
Mass defines the total mass of a rigid body which determines how quickly it reacts to the forces applied to it. The more massive a rigid body, the more difficult it is to change its direction.
With density, Softimage computes the mass based on the Density value you enter in relation to the volume of the object's bounding box, so larger objects automatically have a higher density than smaller ones.
Because dynamics simulations imitate physical laws by performing intensive calculations, there are certain limitations to what can be calculated. Infinite and very small values, such as an object with hardly any mass, such as grids, nulls, and other objects with little volume, should not be used. The calculations required for these types of object may introduce numerical errors into the simulation and cause the objects to simulate with strange behavior.
Select the Use Mass option and set the Mass value, which is the object's mass in kilograms.
Deselect the Use Mass option and set the Density value, which is in kilograms per Softimage unit cubed of the object (kg/SI unit¸) because it is the object's mass per its volume.
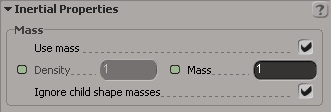
If the rigid body object is a parent in a hierarchy, set the Ignore child shape masses option:
If you select this option, the parent ignores the child in its calculations and the child follows the parent's movement in the simulation. This is the default behavior.
If you deselect this option, the child moves independently from the parent in the simulation.
For more information, see What Can Be a Rigid Body?
The center of mass is the location at which a rigid body spins around itself when dynamics are applied (forces and/or collisions). With forces, you can also determine on which part of the rigid body they are applied, which also affects the object's movement (see Applying Forces to Rigid Bodies).
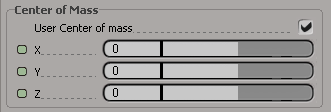
By default, the center of mass is defined at the same location as the object's center (wherever the center is located), but you can change the center of mass's position in XYZ coordinates that are local to the rigid body. For example, if you set the center of mass within the rigid body itself, the rigid body spins about itself; if you set it outside the rigid body, the body rotates about the center of mass, like a pivot point.
Center of mass at the default location of the object's center.
The center of mass icon helps you visualize where the rigid body's center of mass is located. This icon appears only for rigid bodies.
Select User Center of Mass and set a position in local coordinates using the XYZ sliders below it.

|

|
On the left, the center of mass is at default location of object's center. Notice how the box bounces a bit before falling off the edge.
On the right, the center of mass is at the bottom-right corner of the object. Notice how the box falls more quickly off the edge and spins more.
 Except where otherwise noted, this work is licensed under a Creative Commons Attribution-NonCommercial-ShareAlike 3.0 Unported License
Except where otherwise noted, this work is licensed under a Creative Commons Attribution-NonCommercial-ShareAlike 3.0 Unported License
 in a viewport and choose
in a viewport and choose  Visibility Options
Visibility Options