You have the choice between two dynamics engines for simulating rigid bodies in Softimage: NVIDIA™PhysX™ or ODE (Open Dynamics Engine). Working with either engine is similar in most ways, but there are important differences that can affect your decision on which engine to choose.
The dynamics engine is set per simulation environment, so you could have different engines for different environments within the same scene. As well, simulations you create using one engine can be converted to the other by simply switching engines as described here.
Set the current simulation environment to the one you want — see Setting the Current Environment.
In the explorer that opens, select Simulation or click its icon to open the Simulation Preferences property editor.
Select an option from the Rigid Body Dynamics Engine list: NVIDIA PhysX or Open Dynamics Engine (ODE) — see Will That Be PhysX or ODE? PhysX is the default engine for new scenes.
Click the Apply Now button to change (update) the dynamics engine of the existing environment to the engine you have selected.
If you don't click this button after switching dynamics engines, the new engine is used only for the next simulation environment that you create. This allows you to have a different dynamics engine for each environment in a scene.
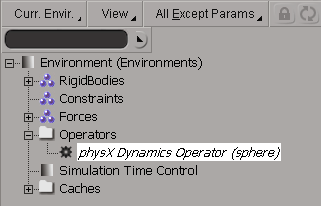
The name of the current engine is displayed for the dynamics operator in the simulation environment in the explorer.
Working with either the PhysX or ODE dynamics engines is similar in many ways, but there are important differences that can affect your decision on which engine to choose. Here is a description of each engine that may help you decide which is the best choice for you:
PhysX is the default engine for new scenes, and is generally more stable and faster than ODE, especially for scenes with many colliding rigid bodies. Even scenes with many rigid bodies that interpenetrate or rigid bodies with complex geometry are simulated easily.
PhysX offers the Convex Hull collision type, which gives a quick approximation of an object's actual geometry (think of it as shrinkwrapping around an object) and can be used for most complex geometry types.
If you need to use the object's actual geometry for a collision, PhysX's Actual Shape collision type is stable and accurate, and allows you to set the level of detail used for creating the collision data. PhysX uses this data to calculate each rigid body's geometry for collisions. Depending on the level of detail and the complexity of the geometry, it may take a bit of time to calculate this data initially, but once it is done, the collisions are fast and accurate.
For more information on the convex hull and actual shape collision types, see Selecting a Collision Geometry Type.
You can offset the position for the spring and slider constraints — see Rigid Body Constraints.
You can use both static and dynamic friction types, unlike ODE which only offers static friction — see Setting the Rigid Body's Elasticity and Friction.
If you're creating rigid bodies to be exported to games engines, check out the parameters on the Advanced page in the PhysX Dynamics Operator property editor — see PhysX Dynamics Operator Property Editor [Properties Reference].
ODE is the rigid body dynamics engine that was used by default in older versions of Softimage.
It is a free, open source library for simulating rigid body dynamics, allowing you to write your own features for it. This can be important when you want to add new functions to, or change existing functions for, the rigid body system.
ODE is cross-platform, allowing you to change it to compile on any platform that you need. This can be an important issue for games developers.
ODE is fully featured and stable for most rigid body simulations. However, it may not perform as well in scenes with many rigid bodies, especially when using the rigid body's actual shape for the collision geometry.
 Except where otherwise noted, this work is licensed under a Creative Commons Attribution-NonCommercial-ShareAlike 3.0 Unported License
Except where otherwise noted, this work is licensed under a Creative Commons Attribution-NonCommercial-ShareAlike 3.0 Unported License








 Preferences
Preferences