This section guides you through the different types of constraints to illustrate how they can improve your solution. Be careful which ones you choose, because it could have a detrimental effect on the solution if you create a poor or conflicting constraint.
Survey constraints have two purposes:
Point constraints provide explicit control over a point’s coordinates. A single point constraint will translate the computed solution to the specified point, for example, the origin. Two point constraints translate and scale the solution. Three constraints explicitly lock the solution to a translation, scale, and rotation. (You should have accurate measurements from the set if you specify three or more point constraints.)
Live also includes a similar feature, called locked points, that can be easier to use than point constraints. For more information, see Create infinite and locked points.
Distance constraints scale the solution to fit a given distance between two points. They are mainly used to set an appropriate scale when the locators are too condensed or too spread out. Be careful of adding too many distance constraints because it is difficult for the solver to satisfy all of them.
 . To
scale the locators, select them all and change the scale values in
the channel box.
. To
scale the locators, select them all and change the scale values in
the channel box.
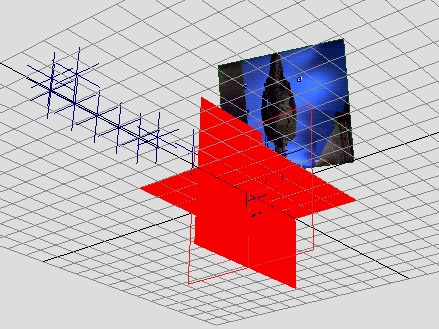
Use plane constraints to constrain points to a wall, floor, table, ground or other flat surface.
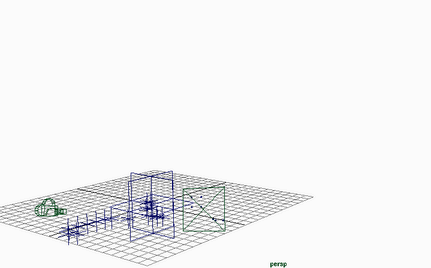
You can constraint points to a line by creating two plane constraints that intersect. In the following example, two planes constrain points to the Z axis. Notice some locators are slightly off the line due to variation in the areas tracked.
Plane constraints try to make points perfectly coplanar. If they are only approximately planar, such as uneven ground, try specifying the plane constraint as Registration only. For details, see Using Registration only.
Depth constraints define the distance from a given point directly to the camera lens for a given frame. Their primary purpose is to help solve tripod shots with camera rotation only. In these shots, the solver cannot determine depth of points, so additional information is needed.
You probably need to add several depth constraints when you use them. Set up constraints for all important points in the first frame. You may also need them for the points in the last frame, especially if the points from the first frame fall out of view.
By default, the solver uses constraints to calculate the solution’s shape. In some cases, however, you may want to use the constraint only for registration of the scene as a whole. To do this, click the Registration only checkbox in the Survey control panel.
Registration only is mainly used for plane constraints on a ground or other surface that is roughly, not exactly, coplanar. Without Registration only, the solver would try to force the points to be coplanar, which may not match reality.






