After Globals and LimbPhases, the rig is broken up hierarchically into the various HubGroups.
Each HubGroup and its children are assigned a series of controllers, usually depicted as graphs, that allow the user to edit the motion cycle. Many of these controllers are repeated in all areas, while some are specific to a particular area.
Each CATMotion cycle is 100 frames long by default. The animation is then compressed or stretched to the right length with a combination of the Globals controls (Max Step Time and Max Stride Length) and the velocity of the Path Node. This means that the Time values are best thought of as percentages of the motion cycle rather than absolutes. For example, a time of 50 is halfway through the cycle.
The light green in the graph background represents the time the feet are on the ground. The dark green represents the time that the feet are in the air.
All controllers except for the OffsetRot and OffsetPos have graphs to show the curve for the motion of the selected controller within the motion cycle.
 Twist, set the control point values for all elements in the HubGroup to zero, and then go to the element youre interested
in and start adjusting its control-point values. Its probably a good idea to do this in a new CATMotion layer, so you can
go back to the original layer without having to restore all the control-point values.
Twist, set the control point values for all elements in the HubGroup to zero, and then go to the element youre interested
in and start adjusting its control-point values. Its probably a good idea to do this in a new CATMotion layer, so you can
go back to the original layer without having to restore all the control-point values.
To open the graph/settings panel for a particular controller, click its name in the hierarchy list in the left panel of the CATMotion editor.
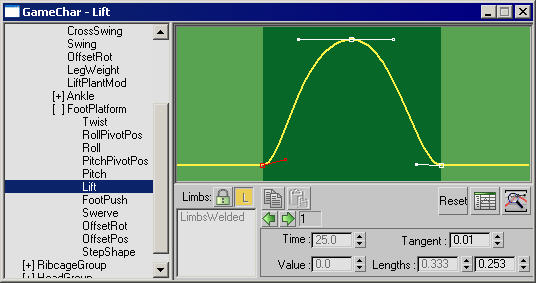
A FootPlatform Lift controller
 /
/ Make Unique (off/on)
Make Unique (off/on)Divides the limbs into separate tracks.
Below the Make Unique and Lock (see following) buttons is a box that provides access to individual limbs when Make Unique is on and Lock is off. In that context you can choose one of the list entries to make separate settings for that limb.
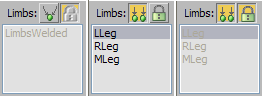
Left: Limbs welded (Make Unique off)
Center: Choose limb to adjust (Make Unique on/Lock off)
Right: Limbs locked (Lock on)
When you have control over the individual limbs, the curve for each limb is drawn in the same color as the limb itself.
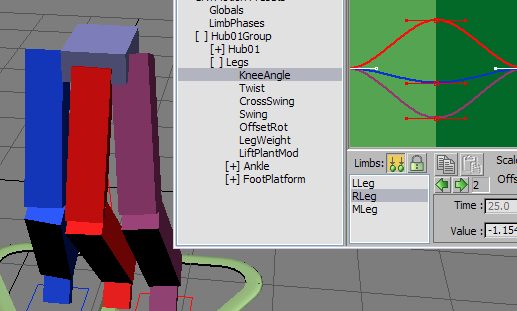
Each curve uses the color of its respective limb.
Also, if you move a point directly on a curve, the respective limb highlights in the list.
 /
/ Lock (off/on)
Lock (off/on) (Previous)/
(Previous)/ (Next)
(Next)Click through the knots on the spline. You can also select a spline knot directly by clicking it in the window.
When you select a knot, its Time, Value, Tangent, and tangent Lengths settings are displayed and are ready for editing.
In some cases, settings are unavailable (grayed out), so cannot be edited.




The output of every CATMotion controller is a combination of different factors. For example, the end result of FootPlatform Lift is a combination of Max Step Time, Max Stride Length, the velocity of the Path Node, and the values you assign to all the individual controllers for the FootPlatform.
CATMotion also integrates CAT's retargeting system, which has two advantages over standard IK: Retargeting eliminates the problem of snapping at the knee joint caused by overextension of the IK chain, and because the leg pushes the pelvis up, the character automatically has “weight.”
Usually it is best not to animate individual CATMotion parameters, but instead simply to blend between CATMotion layers by animating the Weight value. This leaves you with far fewer keyframes to manage.
Animation controllers unique to legs include LiftPlantMod, KneeAngle, and LegWeight.
Ankle controllers include DigitRollAngle, DigitSpreadAngle, DigitCurlAngle, TargetAlign, and FootBend.
The FootPlatform is the IK target for the feet. Its motion is critical to the animation of the legs.
Arm controllers include CrossSwing, Swing, and Bend.
Collarbone controllers include MotionX, MotionY, and MotionZ.
For the most part, palms have the same controllers as ankles. The exception is HandFlop.





