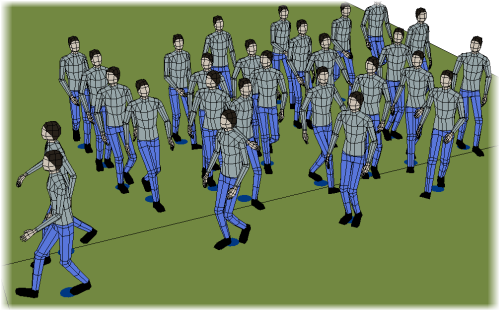
アクターがカーブまたはコーナー(特に次の画像内のようにシャープなもの)を回るとき、その足はわずかにサイド(X 方向)にスライドします。このずれを防ぐ処置として、アクターの足の方向をコンストレイント(ロック)できます。
最善の結果を得るためには、アクターがウォーク サイクルにある間その足をロックすることをお勧めします。これは、ランニングと比べ、足が長時間にわたってグラウンドと接触するためです。アクターの足がグラウンド上にあるフレームをウォーク サイクル内で見つけ、各足のサイクル期間にわたり足の回転をロックする必要があります。
[Animation_Blending]ICE Tree にあるシミュレーション ポイント クラウドの[アニメーションの定義](Define Animation)ノードで、Crowd Lock Feet Constraint(群集の足のロックのコンストレイント)コンパウンドを取得します。
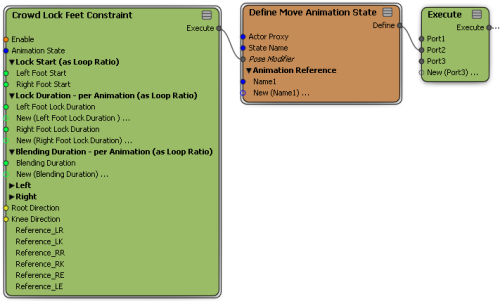
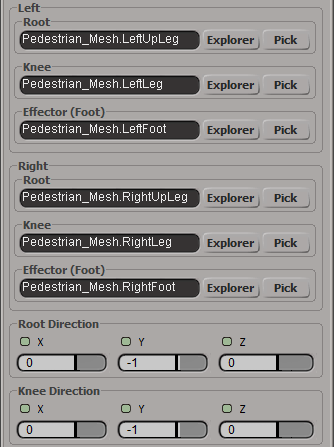
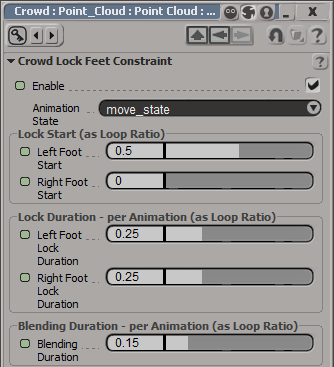
[群集の足のロックのコンストレイント](Crowd Lock Feet Constraint)コンパウンドのプロパティ エディタを開き、[左](Left)と[右](Right)の脚に使用するリグ プロパティ デフォーマを指定します(「脚部をグラウンドにコンストレント」を参照)。
次の図では、0~1 の範囲でどのようにウォーク サイクルが開始および終了するかについて説明します。
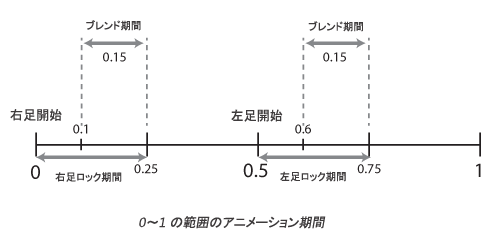
デフォルトでは、ウォーク サイクルは右足で開始します。それぞれの足に対して、値を 0~1 の範囲で設定する必要があります。たとえば、ウォーク サイクルが右足で始まる場合、[右足開始](Right Foot Start)フィールドの値は 0 です。左足の開始のデフォルト値は 0.5 です。
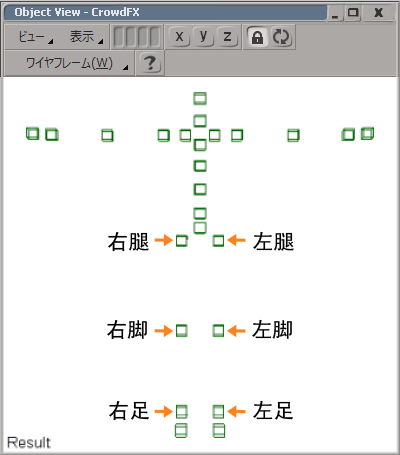
「脚部をグラウンドにコンストレント」で説明されているように、[根元の方向](Root Direction)と[ニーの方向](Knee Direction)を、その子の方向を指すデフォーマのローカル軸に設定します。
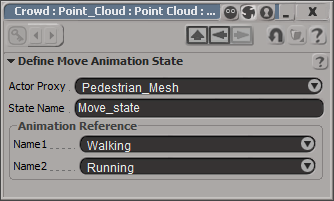
[移動アニメーション状態の定義](Define Move Animation State)ノードを使用すると、アクターがただ歩きまわるように、簡単に設定できます。内部的には、このノードは[アニメーションの状態の定義](Define Animation State)ノードと、歩き回る、または走り回るアクターの速度に応じてアニメーション サイクルを再生するためのソルバを使用して、アクターの足がスリップしないようにします。移動に使用する歩行や走行などの適切なアニメーション サイクルを選択します。