群集内のアクターを、パスに沿って移動させる場合、実際には、アクターはカーブに沿った多数の「ゴール」に沿って順番に移動します。ただし、実際のゴール オブジェクトを作成する必要はありません。カーブに沿ったそれぞれの位置が暗黙のゴールになります。
パーティクル エミッタはカーブに沿った任意の地点に置くことができ、アクターはカーブ上の最も近い「ゴール」に向かいます。すべてのアクターがカーブの始点から始めようとするわけではありません。
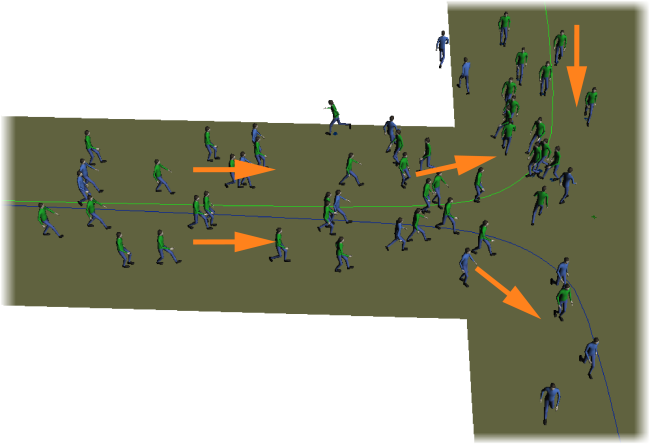
このイメージでは 2 つのパスが作成され、アクターがそれぞれのパスに沿って進み、反対の方向から開始するアクターもいます。
パスとして使用するカーブを作成します。アクターがカーブで減速するときに混雑する可能性があるので、カーブ上に急コーナーを作成しないようにするとよいでしょう。
クラウド ポイント クラウドの[挙動](Behavior)ICE Tree 内で、カーブの[Get Data]ノードを作成します。
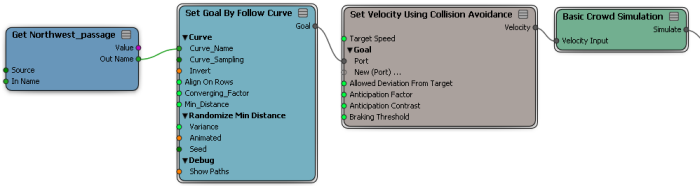
Set Goal By Follow Curve(従属カーブによりゴールを設定する)コンパウンドを取得し、Set Velocity Using Collision Avoidance(衝突回避を使用した速度の設定)コンパウンドの[ゴール](Goal)ポートに接続します。
カーブの[Out Name]出力を、[カーブに従う](Follow Curve)コンパウンドの[カーブ名](Curve Name)ポートに接続します。
カーブに沿ったゴールの数を設定するには、[カーブ サンプリング](Curve Sampling)値を設定します。この値を高くすると、アクターはよりカーブに近づいて移動します。
アクターを、カーブの真上、またはカーブに平行に移動させるには、[収束係数](Converging Factor)値を設定します。







