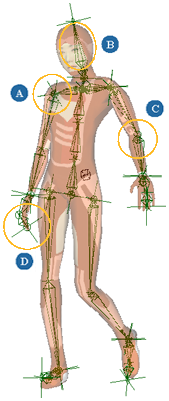
Skeletons in Softimage are made up of bones that are linked together by articulated joints that can rotate. The combination of bones and joints is referred to generically as a chain in Softimage because you can use chains for animating any type of object, not just humans or creatures.
Chains have four basic elements: a root, bones, joints, and an effector. There is no limit to the number of bones a chain can have, but there must be at least one bone in a chain.
You can also create chains using only implicit bones to create non-IK rigs - see Drawing Implicit Bone Chains.
The chain root is a null that acts as the starting point on the chain. It is the parent of all other elements in the chain. Because the first joint is local to the root, the root's position and rotation determine the position and rotation of the rest of the chain. In a 2D chain, the entire chain extends on the root's (and first bone's) XY plane, called the resolution plane (see The Chain's Resolution Plane). A chain root can be the child of another object, such as another chain root or an effector.

The bone is the piece that connects roots, joints, and effectors. A bone always rotates about its joint, which is at its top. The first bone in a chain rotates around the root. The first bone in the chain is a child of the chain root, and all other bones are children of the previous bones in the chain.
Keying the rotation of bones is how you animate with forward kinematics (FK).

A joint is the connection between two elements in a chain: there is a joint between the root and the first bone, between bones in the chain, and between the last bone and the effector. The first joint is between the root and the first bone.
A joint can be either 2D or 3D and acts differently for each (see 2D and 3D Chains for a description of the types of chains):
In a 2D chain, the joints act as hinges, restricting movement so that it's easier to create typical limb actions, such as bending an arm or leg. Only its first joint at the root acts as a ball joint, allowing a free range of movement: when using IK, the rest of the 2D chain's joints rotate only on the root's Z axis, like hinges. Of course, you can rotate the joints of a 2D chain in any direction with FK, but this is overridden as soon as you invoke IK.
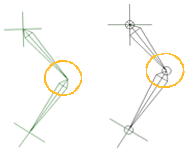
A 2D joint is indicated on a chain by a circle. The angle of the circle indicates the plane along which the chain will unfold, or the resolution plane (see The Chain's Resolution Plane).
In a 3D chain, the joints can move any which way they like. All of its joints are like ball joints that can rotate freely on any axis, allowing you to animate wiggly objects like a tail or seaweed. A 3D joint is indicated by three circles along the joint's X, Y, and Z axes.
The effector is a special null that is the last part of a chain. Moving the effector invokes IK, which modifies the angles of all the joints in the chain between the root and the effector.

By default, when you create a chain in Softimage, the effector is a child of the chain root. This allows you to place the effector anywhere in the chain's hierarchy or even make it the child of an object outside of the chain. As well, you can animate the effector in local space as opposed to global.
For more information about animating the effector, see Animating the Effector.
Chains can be either 2D or 3D. So what's the difference?
2D chains essentially act as hinge joints, restricting movement so that it's easier to create typical skeleton actions, such as bending a leg or arm. When using IK (inverse kinematics), a 2D chain's joints can only rotate on the Z axis of the root, like hinge joints.
If you create a 2D chain and move the effector (invoke IK), you'll see that the joints after the first bone all act as hinges. Of course, you can rotate the joints of a 2D chain in any direction with FK (forward kinematics), but this is overridden as soon as you invoke IK.
3D chains, however, can move any which way they want. Its joints can rotate freely on any axis, like ball joints. This lets you create anything, such as a dog's wagging tail.
The first joint connecting the root to the first bone on either a 2D or 3D chain is always a ball joint, and it can rotate on any axis.
The following shows where different skeleton elements can be found in the explorer (or using the Selection button on the Select panel to open an explorer specific to the object). By clicking on their icons, you can open their property editors:
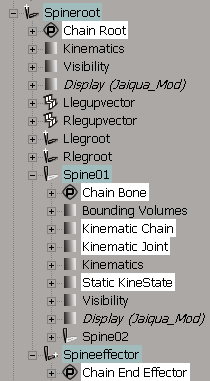
Root properties are only its visibility properties and shadow radius for the chain root. To set these, click the select the chain root and press Enter or click the root's icon in the explorer (not the Chain Root icon — the one for the node above it).
Bone properties are set in the Chain Bone property editor. Select a bone and press Enter or click the Chain Bone icon in the explorer. If you press Enter, you get the chain, joint, and bone property editors all in one.
Joint properties are set in the Kinematic Joint property editor. Select a 2D joint or bone and press Enter or click the Kinematic Joint icon in the explorer.
Static KineState indicates that an envelope is applied to the skeleton element. The StaticKineState is the initial position of the skeleton when the envelope was applied, and is used for envelope calculations.
Effector properties are mostly set in the Kinematic Chain property editor (see below for opening it).
However, to change only effector display and shadow properties in the Chain End Effector property editor, select the effector and press Enter or click the effector's icon in the explorer (not the Chain End Effector icon — the one for the node above it).
When you're working with chains, you often need to open the Kinematic Chain property editor. This property editor contains most of the parameters that affect how an IK chain is solved (especially effector properties).
Select any chain element from the same or different chains and choose Create  Skeleton Inspect Chain Properties or press Ctrl+R.
Skeleton Inspect Chain Properties or press Ctrl+R.
The Kinematic Chain property editor for the selected chain is opened. If you had elements selected from several chains, the property editors open in multi-mode.
 Except where otherwise noted, this work is licensed under a Creative Commons Attribution-NonCommercial-ShareAlike 3.0 Unported License
Except where otherwise noted, this work is licensed under a Creative Commons Attribution-NonCommercial-ShareAlike 3.0 Unported License







