Biped character models are humanoid models that walk on two legs and make contact with the floor using only their feet.
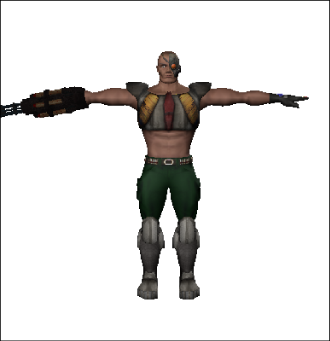
Biped character model
A stance for a biped model resembles a T pose in which the arms are parallel to the floor, the feet are flat on the floor, and the spine is straight. The model should face towards positive Z-axis. This is referred to as a T-stance. See Stance.
If your biped model uses fingers and toes, make sure each hand is open and flat with the fingers and thumb straight. For feet, the ankle should be bent to ensure proper floor contact and the toes should be straight and pointed toward the positive Z-axis.
Quadruped character models are four-legged and make contact with the floor using all four limbs (both hands and both feet). When you create and characterize a four-legged character, select Quadruped if your model is a four-legged animal such as a dog, cat, horse, and so on.
A stance for a quadruped model has the front and back limbs and all fingers and toes fully-extended towards the floor. The model should face towards the positive Z-axis. See Stance.
After you characterize quadruped, you may need to rotate and adjust the hands and feet for proper floor contact.
Quadruped feet are not automatically adjusted like the feet on a biped (T-stance). This is to allow for all possible foot types, such as paws, feet, hooves, claws, and so on.
 Except where otherwise noted, this work is licensed under a Creative Commons Attribution-NonCommercial-ShareAlike 3.0 Unported License
Except where otherwise noted, this work is licensed under a Creative Commons Attribution-NonCommercial-ShareAlike 3.0 Unported License







