パッシブ カーブとアクティブ カーブの比率(パッシブ カーブ(Passive Fill))を指定できます。パッシブ カーブはアクティブ カーブのダイナミックな動作を補間しますが、すべてのカーブをシミュレーションするよりコストがかかりません。詳細については、パッシブ フィル(Passive Fill)を参照してください。
細かく説明すると、パッシブ毛根の動きは、自身のモーションを計算するのではなく、付近のダイナミック毛根のモーションを補間することで定義されます。パッシブ カーブはペイント エフェクトと NURBS カーブ(NURBS Curve)出力の両方で使えます。
パッシブなヘアが入力に開始位置(Start Position)カーブを持たない場合、モーションに加えてそのシェイプもまわりのダイナミック毛根のモーションを補間して定義されます。パッシブなヘアではダイナミクス、フォース、または衝突は計算されません(follicle のシミュレーション方法(Simulation Method)アトリビュートはヘアがダイナミックか、パッシブか、あるいはスタティックかを定義します。スタティックなヘアは開始位置から動かず、アニメーション化しません)。(詳細については、開始(Start)カーブ、レスト(Rest)カーブ、現在位置(Current Position)カーブを参照してください。)
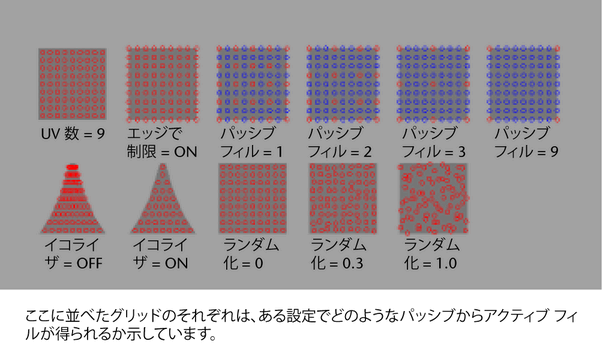
パッシブ フィル(Passive Fill)アトリビュートは、既定ではアクティブ : パッシブに設定されている毛根の割合を定義します。パッシブ フィルが 1 の場合、毛根の行と列は 1 つおきにパッシブになります(これらの行や列に入っていない点はダイナミックになります)。2 の場合、ダイナミックな点を含む行 1 つに対しパッシブな行と列が 2 つずつ作られます。パッシブ フィルの値が増えると、ダイナミックなヘアの数は飛躍的に小さくなります。ヘアのモーションが比較的均一な場合、パッシブ ヘアの割合が高くても違いに気がつかないかもしれません。ただし、パッシブ フィルはアクティブ ヘアの間で均一に補間されます。これによりヘア全体が均一になり、自己衝突 (Self Collide)は必要ありません。
毛根の作成時にパッシブ毛根には開始位置カーブが作成されませんが、パッシブ毛根を選んでから nHair > 開始位置の設定(nHair > Set Start Position) > 現在位置(From Current)と選択すると簡単に作成できます。次いで、開始カーブを編集すれば、パッシブなヘアのシェイプを編集できます。
パッシブ毛根はモデリングだけにも使用できます。開始カーブの小規模な集合を変更することで、パッシブ毛根によるヘアのスカルプトが可能です。そのためにはまず、ダイナミックなヘアを少ない割合で含むヘアを作成します。現在位置と開始位置の両方を表示し、タイムスライダを開始フレームに合わせます。ダイナミックな毛根の開始(Start)ヘアを編集すると、開始位置を持たないパッシブヘアが補間を行います。ヘアのシェイプを作成できたら、パッシブ毛根の現在位置から開始位置を設定し、毛根をアクティブにできます (毛根を選択し、チャネル ボックス(Channel Box)でシミュレーション方法(Simulation Method)をダイナミック(Dynamic)に設定します。)
パフォーマンスの最適化といった意味では、現在パッシブ毛根が有用なのは特定の状況においてのみです。これは、ヘアに関する機能についてはダイナミックな計算が通常は全体の計算コストの一部でしかなく、特に出力カーブの使用時にはこの傾向が顕著なためです。自己衝突、高い伸長の抵抗(Stretch Resistance)値、ベンドの抵抗(Bend Resistance)値、およびサブステップ(Substeps)値などのコストのかかるダイナミクス計算は、ヘアの大部分がパッシブ ヘア カーブの場合、より高速に完了します。毛根の数が多い場合、ペイント エフェクト出力は NURBS カーブ出力の 10 倍速くなります。パッシブ毛根を使用しているときにジオメトリと衝突させ、シミュレーションしているカーブでの CV の数が高い場合に、パフォーマンスの改善が多くみられる傾向にあります。(シミュレーションするカーブ上のポイントの数は、開始カーブの CV 数に毛根ノードのサンプル密度をかけたものです)。さらに、hairSystem 内のシミュレーション方法(Simulation Method)オプションを使うと、パッシブな毛根は隠してアクティブな毛根のみを出力できるようになります。
しかし、最大の利点はパッシブなヘアがコヒーレントな集合として動くことです。この性質を用いて、自己衝突のための余分なコストをかけることなく、ヘアの大きな集合の自己衝突コヒーレンスを擬似的に再現できます。他にも、直接モデリングする必要がないという利点があります。