可以移动 ArmControl,以使机械臂完全延伸到拉直的位置,或者将机械臂本身以并不需要的其他位置为方向。
可以限制机械臂的运动范围,以确保 IK 系统能够以可预测的方式设定姿势。在以下部分中,将按如下方式限制 IK 系统的运动:
- 锁定控制对象 (ArmControl) 的平移,以便该对象只能在 Y 和 Z 方向上移动。通过锁定 X 通道,使其无法被选择或修改,因此机械臂将无法从一侧移动到另一侧。
- 将机械臂的旋转锁定在旋转底座上,使其仅围绕其 Y 轴旋转,而不是围绕其 X 轴或 Z 轴旋转。
- 限制机械臂控制对象的平移,以使机械臂无法完全延伸到拉直的位置。
为 ArmControl 锁定通道
- 在中,选择 ArmControl 节点。
- 打开以查看 ArmControl 的变换通道。
- 将所有或通道设定为 0(如果尚未进行设定)。
- 在中,通过单击通道的名称选择该通道。
- 在上单击鼠标右键。
此时将显示一个下拉菜单。
- 从该下拉菜单中,选择。
的数值字段将以暗灰色显示,指示该通道已锁定。除非解除锁定通道,否则无法在 X 方向上移动 ArmControl。
为 SwivelBase 锁定和“旋转 Z”通道
- 在中,仅选择 SwivelBase 节点。
- 打开以查看 SwivelBase 的旋转通道。
- 将所有或通道设定为 0(如果尚未进行设定)。
- 在中,通过按住 Ctrl 键并单击通道和通道的名称,选择这些通道。
- 在任一选定名称上单击鼠标右键,并从出现的下拉菜单中选择。
确认和“旋转 Z”通道已锁定
- 在中,确保仅选中 SwivelBase 节点。
- 在视图中,选择。
- 在视图中,选择。
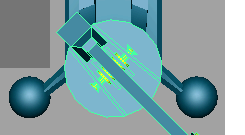
- 推拉顶视图,以便可以完全查看机械臂,如下图所示。
- 在中,通过在通道中键入 45 并按 Enter 键,来旋转 SwivelBase。
SwivelBase 将在视图中旋转,但机械臂没有旋转。您首先可能会认为发生了错误,因为 SwivelBase 以及机械臂的所有骨架和曲面被设置为同一层次的子对象。
注意在设置 IK 系统时,您有时可能会发现,某些操作并不会按最初预期的方式进行。发生这种情况时,最好停止并诊断为何它这样操作(或者为何它不按预期方式进行)。这样可以追溯您的操作,以确定问题所在。
ArmControl 和未设置为 SwivelBase 层次的子对象。因为 ArmControl 和控制机械臂的移动,所以必须将 ArmControl 和“IK 控制柄”设置为 SwivelBase 层次的子对象,才能使机械臂在 SwivelBase 旋转时进行旋转。
将设置为骨架层次的子对象
- 在中,选择 SwivelBase 节点。
- 在中,将 SwivelBase 的通道重置为 0。
在将设置为层次中 SwivelBase 的子对象之前,必须将先前的所有变换设定为零。
- 在执行下列步骤之前,取消选择 SwivelBase 节点。
- 在菜单中,选择。
将显示该场景的所有节点。
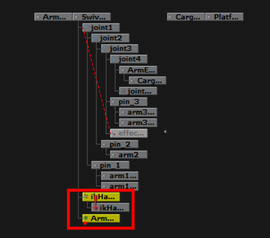
- 在中,按住 Shift 键并选择名为 ikHandle1、ArmControl 和 SwivelBase 的节点。
选择的顺序很重要。首先要按住 Shift 键并选择将成为子节点的项目,然后再按住 Shift 键并选择将成为父节点的项目。
- 在主菜单中,选择(热键 p)。
在中,和 ArmControl 现在是骨架层次中 SwivelBase 节点的子节点。
- 在中,仅选择 SwivelBase。
- 在中,将 SwivelBase 的设定为 45。
旋转 SwivelBase 时,机械臂因其在层次中的关系也会旋转。
- 将 SwivelBase 的值重置回 0。
最后,需要限制机械臂控制对象可以在距模型底座多大距离内平移,才能使机械臂不会延伸到完全拉直的位置。
若要确定平移限制的设置,需要在中查看平移值的同时,检查各个位置的机械臂的位置。
确定机械臂控制对象的平移限制
- 在中,选择 ArmControl。
- 确保打开,以便可以查看 ArmControl 的平移通道。
- 在视图中,选择。
- 推拉侧视图,以便可以完全查看机械臂。
- 选择。
- 在侧视图中,单击鼠标中键并沿对角方向拖动鼠标,直到机械臂完全伸展为止,如下图所示。
- 在中,观察显示在和“平移 Z”通道中的数字。
如果机械臂是在货物箱上方对角铰接的,那么当平移值大致如下时,机械臂几乎会完全伸展:
- 在侧视图中,按住鼠标中键并沿对角方向拖动鼠标,直到机械臂几乎完全压缩,如下图所示。
- 在中,观察显示在和“平移 Z”通道中的数字。
当机械臂铰接到压缩姿势时,平移值会大致如下:
上述最小值和最大值将在接下来的步骤中用作对 ArmControl 的最小平移限制和最大平移限制。
为机械臂控制对象设定平移限制
- 在中,选择 ArmControl 节点。
- 打开(,或者在上单击图标
 )。
)。
将显示与机械臂控制对象关联的节点。
- 在中,单击“ArmControl”选项卡。
如果“ArmControl”选项卡不可见,请使用左滚动箭头和右滚动箭头横向滚动视图进行查看。
- 在中,展开属性,然后展开属性。
- 在属性中,单击和对应的和“平移限制 Z”复选框,然后设定下列值:
- (最小值):-13
- (最大值):7.5
- (最小值):-13
- (最大值):1
- 隐藏。
- 选择“ArmControl”。
- 在侧视图中,移动 ArmControl 以测试 IK 系统的移动范围。
机械臂会在一个受限的运动范围内移动。