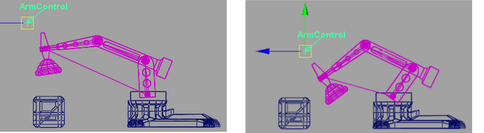
可以使用“点约束”将“IK 控制柄”(IK Handle)约束到控制对象 (ArmControl)。点约束可用于使一个对象的变换属性由另一对象的变换控制。例如,无需触动“IK 控制柄”(IK Handle)即可选择和放置 ArmControl。也可以设定约束,以便保持 ArmControl 与“IK 控制柄”(IK Handle)的当前距离(偏移)。偏移将确保受约束的 IK 控制柄不会移动到与控制对象相同的位置。
 。
。
拖动操纵器时,控制对象将发生移动,进而移动“IKHandle”。因为 IK 控制柄控制骨架和机械臂模型,所以骨架和机械臂模型也会发生移动。控制对象和“IK 控制柄”(IK Handle)之间的偏移将保持不变。
旋转时,货物磁体不会持续向下指。货物磁体方向基于其在原始位置发生的旋转。
如果将货物磁体设定为向下朝向场景地板的方向,不考虑手臂其他组件的方向,则机械臂的姿势将更易于设定。
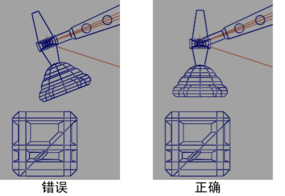
用方向约束使 CargoMagnet 向下指。方向约束将约束对象 X、Y 和 Z 轴的方向(旋转),以便与约束(目标)对象相匹配。
在接下来的步骤中,将机械臂的位置重置为其默认位置,然后将方向约束应用于 IK 系统中的最后一个关节,以使其方向与控制对象相匹配。产生的效果是 CargoMagnet 始终向下指,不考虑场景中其他任何移动。
 ,打开“通道盒”(Channel Box)。
。
,打开“通道盒”(Channel Box)。
。
Joint4 已约束为与控制对象的方向相同。在“Hypergraph”中,已在层次中的 joint4 节点下创建约束节点。







