アクターがカーブまたはコーナー(特に次の画像内のようにシャープなもの)を回るとき、その足はわずかにサイド(X 方向)にスライドします。このずれを防ぐ処置として、アクターの足の方向をコンストレイント(ロック)できます。
最善の結果を得るためには、アクターがウォーク サイクルにある間その足をロックすることをお勧めします。これは、ランニングと比べ、足が長時間にわたってグラウンドと接触するためです。アクターの足がグラウンド上にあるフレームをウォーク サイクル内で見つけ、各足のサイクル期間にわたり足の回転をロックする必要があります。
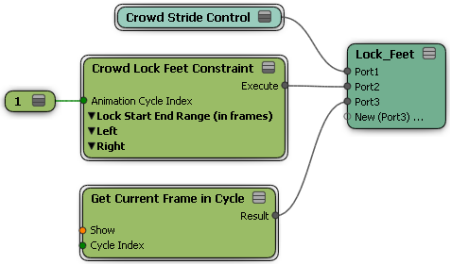
シミュレーション ポイント クラウドのスケルトン シミュレーション ICE ツリーで、[群集の足のロックのコンストレイント](Crowd Lock Feet Constraint)コンパウンドを取得し、[ロコモーションを設定する](Set Locomotion)の下の ICETree ポートにプラグインします。
[群集の歩幅のコントロール](Crowd Stride Control)コンストレイントをこのコンストレイントと一緒に使用する場合は、最初に歩幅が計算されるようにするために、このコンストレイントを[群集の歩幅のコントロール](Crowd Stride Control)コンパウンドの下に接続してください。
[群集の足のロックのコンストレイント](Crowd Lock Feet Constraint)コンパウンドのプロパティ エディタを開き、リグ プロキシ デフォーマが[左](Left)と[右](Right)の脚に使用されるように設定します(「脚をグラウンドにコンストレイントする」を参照)。
子を指しているデフォーマのローカル軸に、[ルート方向](Root Direction)と[膝方向](Knee Direction)を設定します(「脚をグラウンドにコンストレイントする」を参照)。
足のロックに使用するアクション ソースのポーズ ID に一致するように、[アニメーション サイクル インデックス](Animation Cycle Index)値を設定します。たとえば、ウォーキング アクションの場合、通常、ポーズ状態 ID は 1 です。アクション ソースのポーズ状態 ID 値は、[Pose State]コンパウンド(通常[ロコモーションを設定する](Set Locomotion)コンパウンド内に存在する)で確認できます。
足ごとに、[ロックの開始と終了の範囲](Lock Start End Range)値を指定することにより、グラウンドに足がついているときにその回転をロックするフレーム範囲を設定する必要があります。
ウォーク サイクルにおいてこれらのフレームが何であるかを確認するには、シミュレーション領域で[Get Current Frame in Cycle]コンパウンドを ICETree ノード上のポートに接続します。この操作で、そのオリジナル アニメーション ソースに相対するサイクルの現在のフレームが表示されます。
また、[Get Actor Pose]コンパウンドを使用してアクション ソース内のアニメーションのフレームを確認することもできます(「アクション ソース内のアニメーションをテストする」を参照)。
[Get Current Frame in Cycle]コンパウンドで、コンストレイント コンパウンド内の[アニメーション サイクル インデックス](Animation Cycle Index)値と一致するように、[サイクル インデックス](Cycle Index)値を設定します。続いて、[表示](Show)オプションを選択し、ビューポート内のアクターごとにフレーム番号を確認します。
シミュレーション内で、一方の足がグラウンドと完全に接触する最初のフレームに移動します。このフレームは、その足の([群集の足のロックのコンストレイント](Crowd Lock Feet Constraint)コンパウンド内の)[左/右足フレーム イン](Left/Right Foot Frame In)値です。
同じ操作を、どちらかの足に対して、その足がボディの背後にあるときに、かかとが上がり始める前の最後のフレームで行います。このフレームは、その足の[左/右足フレーム アウト](Left/Right Foot Frame Out)値です。
この画像では、ウォーク サイクルのフレーム 9 付近で右のかかとがまだフロアと完全に接触しており、ちょうど上がろうとしているところです。
[フレームのブレンドアウト](Blending Frames Out)値を、コンストレイントされた足位置とコンストレイントされていない足位置をブレンドするフレームの数に設定します。この設定により、[左/右足フレーム アウト](Left/Right Foot Frame Out)値に定義されたフレームに達した後は足が上がらなくなります。