二足のアクターを使用している場合、丘を歩いて登っている場面や他のアクターを避けるために減速している場面など、シミュレーションで非常にゆっくり歩いているときに、その歩幅を制御できます。
ゆっくり歩いている場合、歩幅は短くなり、足をグラウンドからあまり上げません。アクターがゆっくり移動しているのに通常の歩行サイクルを調整しないと、スロー モーション映像に見えたり、水中を歩いているかのように見えることがあります。
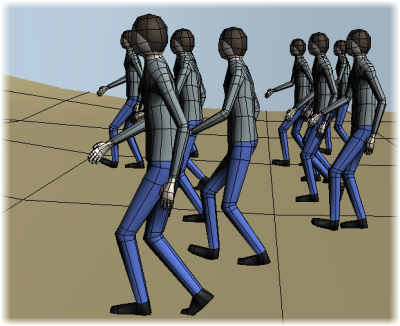
下のイメージでは、アクターは、丘の登り始めで歩く速度を落としたときに、歩幅を短くして歩いています。
歩幅の制御には、アクターがゆっくり歩いているときにのみ使用する一歩の長さとともに、この短い歩幅を使用するときの速度を設定する必要があります。続いて、脚をコンストレイントして、ゆっくりと歩くときにアクターの足をどこまで上げるかを設定します。
シミュレーション ポイント クラウドの[放出](Emit) ICE ツリーで、[移動データの初期化](Initialize Locomotion Data)コンパウンドの[歩幅制御の有効化](Enable Stride Control)オプションを選択します。
このコンパウンドで、[最小歩幅スケール](Min Walk Stride Scale)値と[最大歩幅速度](Max Stride Speed)値を設定します。通常、アクターがゆっくり歩いているときには、アクターの歩幅のスケールを通常歩行の歩幅より小さくする(半分の長さなど)必要があります。歩幅は、アクターが、[最大歩幅速度](Max Stride Speed)値よりも遅い速度で移動するときにのみ調整されます。
シミュレーション ポイント クラウドの[スケルトン シミュレーション](Skeleton Simulation) ICE ツリーで、[群集の歩幅制御](Crowd Stride Control)コンパウンドを取得して、それを[移動の設定](Set Locomotion)の下の ICETree ポートにプラグインします。
[群集の歩幅制御](Crowd Stride Control)コンパウンドのプロパティ エディタを開き、[左](Left)と[右](Right)の脚に使用するリグ プロパティ デフォーマを指定します(「脚をグラウンドにコンストレイントする」を参照)。
子を指しているデフォーマのローカル軸に、[ルート方向](Root Direction)と[膝方向](Knee Direction)を設定します(「脚をグラウンドにコンストレイントする」を参照)。
[高さ最小](Height Min)値と[高さスケーリング](Height Scaling)値を使用して、低速度時に足が持ち上げられる度合いを設定します。
アクターがゆっくり歩くときの足は、通常グラウンドからあまり持ち上げられないので、[高さスケーリング](Height Scaling)値で足の高さを(たとえば、半分の高さに)下げる必要があります。
最小の高さ([高さ最小](Height Min)値)を、静止位置でのリグ プロキシの足の高さに設定する必要があります。これにより、[高さスケーリング](Height Scaling)を調整したときに、足がこの値よりも低くなりません。