如果源角色与目标角色之间存在大小差异,您可以调整“重定目标特定”(Retarget Specific)属性,以精细调整重定目标的结果。
可以在设定为 Maya 项目的 GettingStarted2014LessonData\HumanIK 目录中找到该文件。
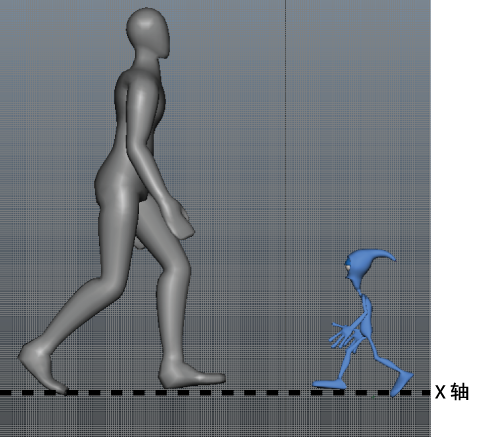
两个已定义的 HumanIK 角色将显示在 Maya 场景中:目标角色 (Pepe) 和源角色 (WalkExample)。
默认情况下,目标角色 (Pepe) 在其自己的动作空间(角色在此处执行运动)中活动,在这里会自动补偿源角色与目标角色之间的比例差异。但是,在本示例中,重定目标不会考虑该 Pepe 的脚部比例也不同。由于他的脚比 WalkExample 的脚长,因此重定目标的结果会受影响。例如,在第 1 帧处 Pepe 的右脚穿透地面且步幅很小。

几个“重定目标特定”(Retarget Specific)属性可以进行调整,以反映源角色与目标角色之间的比例差异和比例。
 >“编辑 > 定义 > 编辑特性”(Edit > Definition > Edit Properties)。
>“编辑 > 定义 > 编辑特性”(Edit > Definition > Edit Properties)。
启用后,此特性会使目标角色在源角色的动作空间中活动,从而使您达到源的 IK 混合目标。
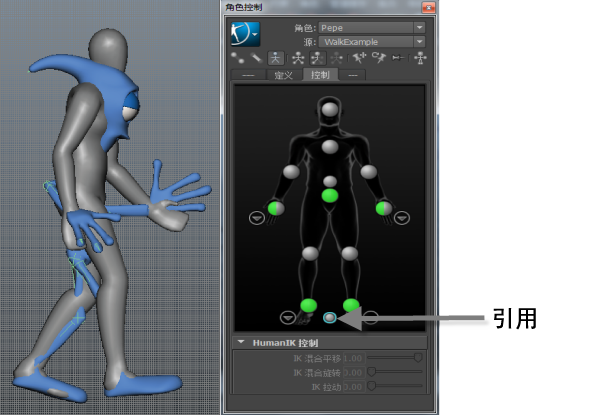
默认情况下,Pepe 的髋部和双脚上的 IK 混合(“IK 混合平移”(IK Blend T)和“IK 混合旋转”(IK Blend R))均设定为 1.00,表示这些身体部位正在到达 WalkExample 的身体部位。



在增加比例后,Pepe 将明显变大,其双手将与 WalkExample 手的位置紧密匹配。这说明,根据目标角色比例的不同,源角色的 IK 混合目标的达到方式也有所不同。
使用“缩放”(Scale)工具的另一种方法是,您也可以选择“通道盒”(Channel Box),并将每个“缩放 X”(Scale X)、“缩放 Y”(Scale Y)和“缩放 Z”(Scale Z)的值设定为 2.5。
>“编辑 > 定义 > 编辑特性”(Edit > Definition > Edit Properties))中,禁用“匹配源”(Match Source) ,因为在本示例中此调整的结果不令人满意。
在确定目标角色的位置时,Maya 会将此值以百分比形式应用到由源角色执行的所有移动的大小。该值越高,角色的步幅越大。值越小,步幅越小。
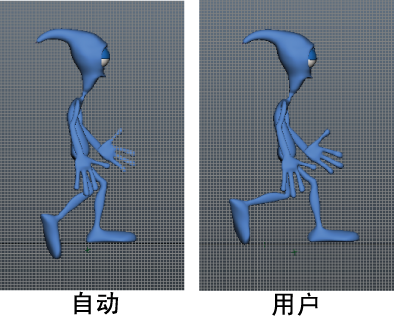
当我们应用用户定义的值而不是保持默认的“自动”(Auto)设置时,Pepe 的步幅明显变大。我们可以在第 54 帧处看到这一改进:
仅设定此属性便可获得良好的重定目标结果。现在,我们已固定步幅,我们可以查看其他特性,从而可以帮助我们获得理想的重定目标结果。
默认情况下,“自动”(Auto)模式可确保脚与地板正确接触。当设定为“禁用”(Off)时,禁用踝部高度补偿。当设定为“用户”(User)时,您可以通过设定“踝部高度补偿”(Ankle Height Compensation)值来手动调整模型的双脚与地板之间的距离。
此值将调整角色的双脚与地板之间的距离。在角色具有特殊高度要求(例如,高跟鞋或靴子)或者角色的脚很大时,通常会调整此值。