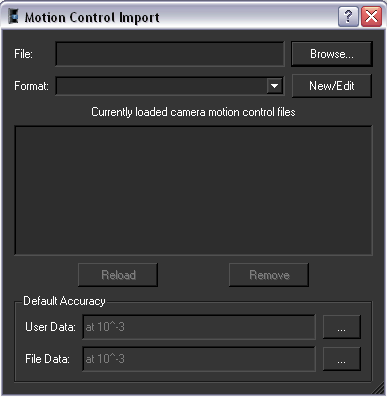
Some hardware devices are able to output what we call “motion control data”. That is, information about its position, rotation and/or internal parameters. All this information can be fed into the MatchMover solver.
It can be used as an initial solution, and MatchMover will then compute the remaining missing parameters, or simply to fine-tune these data, usually not so accurate.
The only need to do so is that the motion control data is stored in an ascii file, which can be easily sequentially processed (that’s to say the data are stored frame by frame). You can then use the Import File Format window to describe and parse your custom files.
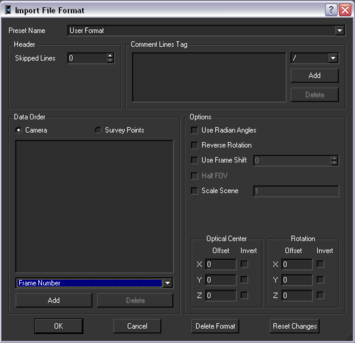
Click the New/Edit button of the Motion Control Import window to edit a file format. The Import File Format window opens.
For example, this corresponds to the dummy file.
>> begin of sample file
This is motion control data
These 2 lines will be skipped
# these are comments lines
# camera 0 with focal 25.65
# data is frame number, OCX, OCY, OCZ
0 12.34 5 2.56
1 45.3 6 3.45
1 44 7 4.55
<< end of sample file
For a new format, enter a name in the Preset Name text field or select an existing one to modify it. Press Delete to remove the current one from the list.
Motion control is then automatically applied for all imported data.
A dummy motion control constraint is then created under the corresponding camera, to show where motion control data is available and used.





