





You set whether an object can move or rotate about a given axis by using the Active check box in the joint rollouts. Joints have a maximum of six possible axes: three for rotation and three for position. You constrain the motion of a joint by setting which axes are active.
Understanding Joint Axis Orientation
IK joint axes for an object are defined by the Local axes of the object’s parent. That means if you activate the X axis of an object’s rotational joint parameters, the object rotates about its parent’s X axis, not its own X axis.
You might have a problem when you set joint parameters for an object whose local coordinate system is oriented 90 degrees from its parent’s coordinate system. In such a case, the rotation angle about one axis becomes indeterminate. The result is that one axis will often cause rotation about one of the other two axes.
The following techniques will make setting joint parameters easier and more successful:
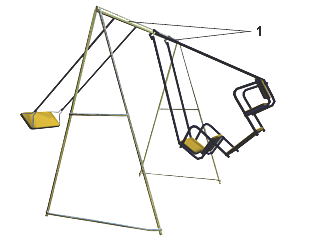
1. Rotational links
When you turn on Active for one of the X, Y, Z axes of a rotational joint, the object can rotate about that axis of its parent’s coordinate system.
Joints that rotate about multiple axes are very common. A ball joint, like your shoulder, is a rotational joint active about all three axes. A pin joint, like your elbow, is a rotational joint active on a single axis.
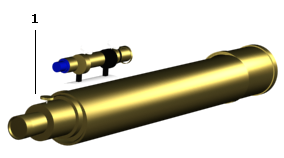
1. Sliding axis
When you turn on Active for one of the X, Y, Z axes of a sliding joint the object can move along that axis of its parent’s coordinate system.
Most sliding joints are active only along a single axis. A telescope is an example of a sliding joint active on a single axis. You rarely see a sliding joint active along all three axes.
If a sliding joint is active along all three axes, it moves independently from its parent. It’s almost as if there is no joint connection at all.

Circular path
When you turn on Active for Path or Surface joints you are setting whether the object can move along the assigned path or surface.
A house key on a ring is an example of an active path joint.
See Path Constraint.