1 つまたは複数の他のアクターとの衝突が間近に迫っている場合、アクターは、このセクションでの説明に従って定義される[衝突回避の初期化](Initialize Collision Avoidance)コンパウンドの[アクセラレーション](Accelerations)パラメータの値に従って反応します。
衝突回避のためにアクターが減速する程度、および衝突回避のためにアクターが方向転換する程度を決定できます。また、各アクターの周囲にバッファを作成して衝突を回避することもできます。これらのパラメータ値は、「Anticipating Collisions in the Simulation」の説明に従って、パーティクルがエミットされるときに初期化され、その後パーティクル シミュレーションの期間に[衝突回避のシミュレート](Simulate Collision Avoidance)コンパウンドによって使用されます。
[衝突回避の初期化](Initialize Collision Avoidance)プロパティ エディタを開くには、ICE ツールバーから、[CrowdFX]  [シミュレーション](Simulation) [編集](Edit) [初期衝突回避の検査](Inspect Init. Collision Avoidance)コマンドを選択できます。
[シミュレーション](Simulation) [編集](Edit) [初期衝突回避の検査](Inspect Init. Collision Avoidance)コマンドを選択できます。
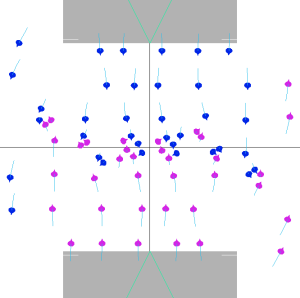
[衝突回避の初期化](Initialize Collision Avoidance)コンパウンドの[最大減速](Max Decelation)値は、アクターが衝突回避のために減速することができる毎秒あたりの最大単位数です。たとえば、アクターの最大減速速度が十分に低くないと、減速が不十分なために衝突を回避できない可能性があります。
以下のイメージでは、減速値が十分に低くないため、一部のパーティクルには衝突回避の時間がありません。
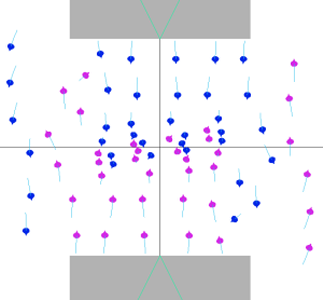
以下のイメージでは、減速値が低くなっており、そのためパーティクルが相互に衝突を回避する時間があり、お互いにやり過ごすことができます。
[最大加速](Max Acceleration)値は、衝突回避後にアクターが[ターゲット スピード](Target Speed)の値に達するために加速することのできる毎秒最大単位数です。この値は、アクターの速度の計算の一部です。
詳細については、「アクターのアニメーションを制御する」を参照してください。
[衝突回避の初期化](Initialize Collision Avoidance)コンパウンドの[低速/ターゲット スピードでの角速度](Angular Velocity at Slow Speed/Target Speed)値により、低速またはターゲット スピードで移動しているときに衝突を回避するためにアクターが他のアクターから方向転換する程度(度/秒)が決まります。
たとえば、衝突を回避するために減速するとき、アクターは大きな角度で向きを変えることができます。これにより、別のアクターとの衝突の可能性を検出した場合、アクターが他のアクターとの「膠着状態」から抜け出るために方向転換できる範囲が拡大します。アクターがターゲット スピードに向かって加速する場合は、衝突の危険性がないため、アクターは小さい角度を使用できます。
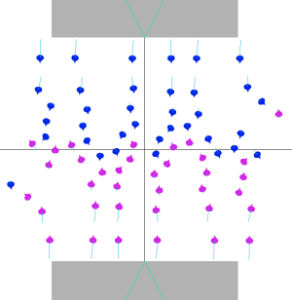
以下のイメージでは低速での角速度値が高くなっており、衝突の危険性がある場合、パーティクルは十分に回転してお互いを避けて移動できます。
以下のイメージでは低速での角速度が低くなっており、パーティクルは、十分に回転してお互いを避けて移動できないため、膠着状態に陥ります。
パーティクルがエミットされるときには、いくつかのパラメータを設定して、パーティクル(アクター)がエミッション時に相互に接近し過ぎることを防止できます(「群集パーティクル放出を設定する」を参照)。
パーティクルがエミットされてエミッタから離れたら、各パーティクル(アクター)の周囲に「安全バッファ」を配置して、アクターが相互に非常に接近したときの衝突を回避できます。バッファの作成では、パーティクル エミッションによって考慮されない各アクター インスタンスのエンベロープのジオメトリを考慮に入れます。
バッファを作成するには、[衝突回避の初期化](Initialize Collision Avoidance)コンパウンドで、各アクター インスタンスのジオメトリ周囲の半径となる[アクターの厚さ](Actor Thickness)値(単位)を設定します。
以下のイメージでは、厚さ値が低くなっているため、パーティクルが相互に極めて接近する可能性があります。互いの周辺を高速で移動できますが、衝突する危険があります。
以下のイメージでは、厚さ値が高いため、パーティクル同士の間隔は広く取れますが、互いが中間地点付近に来たときにそこで渋滞しやすいという傾向があります。