Before you get started with soft body, you need to choose which type of geometry to use for both the soft-body object as well as the obstacles. As well, you need to set the appropriate resolution of the geometry to get the desired soft body collision effect.
You can use either polygon or NURBS surface objects with soft body, but you may find that polygon objects give a slightly more accurate deformation because their points lie directly on their surface, unlike NURBS surface objects (see Data Exchange for more information on object geometry).
You can also use high-resolution models: because soft body is practically resolution independent (in terms of time performance), what is more important is the resolution of the lattice (as defined by the Sampling parameter).
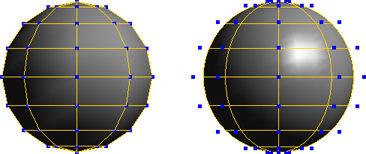
On the left, a polygon mesh sphere has points directly on its surface.
On the right, a NURBS surface sphere has its points away from the surface.
You can apply soft body to multiple objects, in a hierarchy or not, but the deformation is applied to each object individually, not in a hierarchical way. That is, if you apply soft body to a parent, it is not propagated to its children to create a "global deformation" of the hierarchy.
You can apply soft body to individual objects in a group, but not to the group itself.
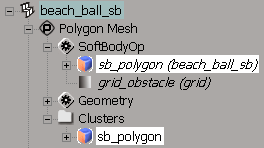
You can use soft body on clusters (such as points and polygons), allowing only part of that object to be deformed by soft body. For example, you can have just the cluster of points of a character's belly be deformed by soft body for some jelly-like fun.
Although soft body is applied to the cluster, the SoftBodyOp operator is stored directly under the object's geometry node, not the cluster itself. However, a reference to the cluster is displayed under the SoftBodyOp node.
When you set an obstacle for collisions with the soft-body cluster, make sure to first select the soft-body object, not the cluster. This is because collisions can happen only with objects, not clusters.
Make sure that the soft-body object has a high enough resolution to give the effect you want. However, high-resolution objects are costly to calculate.
Generally, the soft-body object must not be too low for two reasons:
You need a sufficient number of vertices for getting a satisfactory collision response. Edges may penetrate some polygons of the obstacle even if the vertices are well managed.
Subdivision not only adds new vertices but also moves the original ones, so you may violate the obstacle constraints.
As with all simulations, the trick is to find the lowest resolution acceptable for the results you want. One way to accomplish this is to use an acceptable low-resolution "stand in" model while you're setting up the basic simulation and collisions. Then when you're done that, swap in the high-resolution model and tune the parameters accordingly.
 Except where otherwise noted, this work is licensed under a Creative Commons Attribution-NonCommercial-ShareAlike 3.0 Unported License
Except where otherwise noted, this work is licensed under a Creative Commons Attribution-NonCommercial-ShareAlike 3.0 Unported License







