The rigid body constraints available in Softimage include: hinge, ball-and-socket, spring, slider, and fixed. These are all
available from the Create  Rigid Body Rigid Constraint or Multi Constraint Tool menu in the Simulate toolbar.
Rigid Body Rigid Constraint or Multi Constraint Tool menu in the Simulate toolbar.
For basic procedures to create any type of constraint, see Overview of Creating Rigid Body Constraints.
When you create a constraint, the constraint object is added to the Constraints group in the current environment (see The Simulation Environment).
Hinge constraints make connected rigid bodies move around an axis that acts as a hinge joint; that is, it provides only one degree of freedom in rotation.
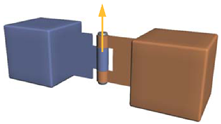
You can set the strength of the hinge's spring, as well as the damping which reduces the velocity. You can also set limits on the hinge to restrict it to a certain range of movement. When you activate limits, a red icon appears at the center of the hinge to show you the current range of movement.
The hinge has an angular spring attached to it. Just as a linear spring applies increasing force the more it is stretched from its rest length, an angular spring applies increasing torque the more it is rotated from its rest angle.
In addition to the movement caused by forces acting on the constrained rigid bodies, you can add a motor to the constraint, which applies a torque to move it at a desired speed (velocity). A motor can be added only if the constraint is attached to two active rigid bodies (see Making Rigid Bodies Move with Constraint Motors).
See Hinge Property Editor [Properties Reference] for information on each parameter.
Ball-and-socket constraints make connected rigid bodies move around a pivot point, allowing them complete freedom of rotation on any axis. You can use this type of constraint to create effects such as a link in a chain or a robotic arm.
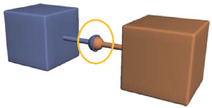
Ball-and-socket with anchor point between the rigid bodies.
You can set the strength of the ball-and-socket's angular spring, as well as the damping which reduces the velocity. An angular spring applies increasing torque the more it is rotated from its rest axis.
Damping is roughly equivalent to friction: damping applies a force opposite and proportional to the angular velocity of the joint. Note that more damping is not always better. If you have a large Damping value (large compared to the Friction parameter), the joint can become unstable: the damping force will be huge, which will move the joint quickly in the opposite direction, which will necessitate an even larger damping force, which will move the joint back even faster, and so on. Generally, the damping value should be no more than twice the spring constant and, for maximal damping, should be between one-third and one-half of the spring constant.
In addition to the movement caused by forces acting on the constrained rigid bodies, you can add a motor to the constraint, which applies a torque to move it at a desired speed (velocity). A motor can be added only if the constraint is attached to two active rigid bodies (see Making Rigid Bodies Move with Constraint Motors).
See Ball and Socket Property Editor [Properties Reference] for information on each parameter.
Slider constraints make connected rigid bodies move along a straight line, as in a telescope or along a piston shaft. They provide one degree of freedom in position.
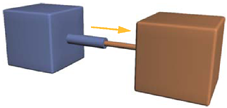
You can offset the position of the slider so that it's not directly connected to the rigid body's center. You can also set limits on the slider to restrict it to a certain range of movement, as well as the bounciness (elasticity) and softness (damping) of the slider when its reaches those limits. When you activate limits, a red icon appears at either end of the slider to show you the current range of movement.
You can set the strength of the slider's spring, as well as the damping which reduces the velocity. The damping force is dependent only on the Damping parameter and the relative angular velocity of the two attached bodies.
In addition to the movement caused by forces acting on the constrained rigid bodies, you can add a motor to the constraint, which applies a torque to move it at a desired speed (velocity). A motor can be added only if the constraint is attached to two active rigid bodies (see Making Rigid Bodies Move with Constraint Motors).
See Slider Property Editor [Properties Reference] for information on each parameter.
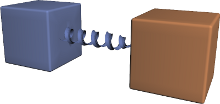
Spring constraints make rigid bodies move as if they are connected together by a spring-like shaft. They provide one degree of freedom in translation based on the spring's elasticity, but complete freedom in terms of rotation.
The Spring constraint is based on Hooke's law which states that the force a spring exerts is directly proportional to how much it extends (its length).
The bodies attached to springs can move around freely relative to each other. The effect is often similar to objects tied with an elastic cord, with the rigid bodies stretching and then bouncing back. You can offset the position of the spring so that it's not directly connected to the rigid body's center.
You can set the strength of the slider's spring, as well as the damping which reduces the velocity. You can also set the rest length, which is the length that the spring tries to return to during the simulation.
See Spring Property Editor [Properties Reference] for information on each parameter.
Fixed constraints keep rigid bodies in a fixed position and orientation relative to each other. This position and orientation is the state in which the rigid body is when you apply the constraint to it.
This type of constraint is useful for keeping rigid bodies attached to a platform, such as for the feet on a robot.
See Fixed Property Editor [Properties Reference] for information on each parameter.
Objects remain fixed in position and orientation relative to each other.
 Except where otherwise noted, this work is licensed under a Creative Commons Attribution-NonCommercial-ShareAlike 3.0 Unported License
Except where otherwise noted, this work is licensed under a Creative Commons Attribution-NonCommercial-ShareAlike 3.0 Unported License







