Soft bodies are objects that deform easily when they collide with obstacles. When you designate an object to be a soft-body object, it simulates the dynamic behavior of non-rigid objects.
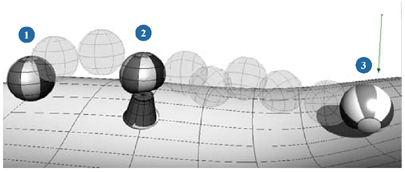
You can, for example, use soft body to deform a beach ball being blown across the sand. As the ball is carried along by wind (the force), it deforms (gets squashed) when it collides with a pail (the obstacle).
The main reason to create soft-body objects is to have collisions with obstacles. Obstacles and collisions for soft body objects are described in Setting Up Soft Body Collisions.
Like other simulations, you can have soft body be influenced by natural forces (gravity and wind). For more information on these, see Forces.
Soft body is a pure deform operator meaning that it moves only an object's vertices, never the object's center. A snapshot is taken at the first frame of the simulation, then at each frame, soft body sets the vertex positions according to the result of the simulation.
Soft body computes the movements and deformations of the object by means of a spring-based lattice whose resolution you can define using the Sampling parameter in the Soft Body Op property editor. The lattice is automatically created around the volume of the model. The higher the resolution of the lattice, the better it mimics the shape of the object. You can set the object to bounce back after a collision and either retain its original form or maintain the deformed appearance after the event, depending on its stiffness.
If the soft-body object is animated, you can either preserve its animation or recalculate it according to any external forces you apply. In the former case, soft body only acts on the deformation of the body and not on its movements. You can also have the soft-body object interact with either stationary or animated obstacles.
If you want to use soft body with other types of deformations, such as envelopes, see Using Cloth or Soft Body with Envelopes and Other Deformations.
Getting a Head Start with Presets
To give you a head start on creating soft-body objects, there are a number of presets available in the SoftBodyOp property editor, as shown here. To use them, apply soft body to an object (see Creating a Soft Body Deformation), click one of the buttons on the Presets page, and calculate the simulation.
To create your own presets, see Saving and Loading Cloth or Soft Body Presets.

Tips for Optimizing Soft Body Performance
There is a list of tips to consider for optimizing soft body performance, as discussed in Tips for Using Cloth and Soft Body.
Previewing Soft Body Simulations with Ghosting
Animation ghosting, also known as onion-skinning, lets you display a series of snapshots of animated objects at frames behind and/or ahead of the current frame. This lets you easily visualize the motion of an object, which can help you improve its timing and flow. Any type of animation can be ghosted, including objects that are simulated.
One effective use of ghosting is using it to preview the soft body simulation. If you set the ghosting to show the frames after the current frame, you can preview the result of the simulation whenever you change the object's state — without even having to run the simulation. This can be a real time saver!
You can use different display modes for ghosting, such as the object's geometry, motion trails, or simple points.
For more information, see Ghosting Animated Objects [Animation].







