MotionBuilder では、Biped(二足歩行)タイプまたはquadruped(四足歩行)タイプのスケルトンを使用できます。
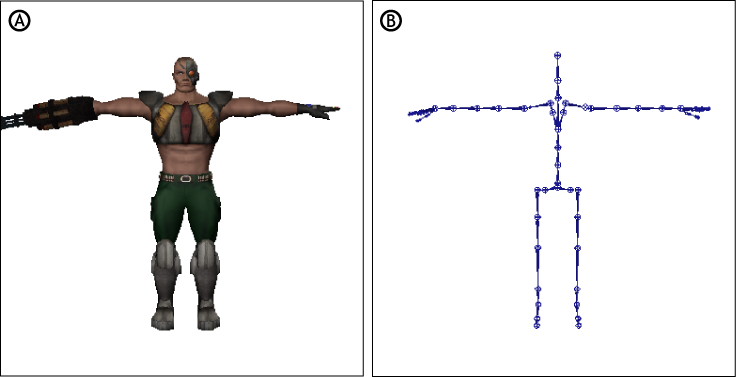
Biped(二足歩行)のスケルトンには、地面に付く手足が 2 本あります。たとえば、人間の二足歩行のモデルが次の図の A に表示されています。B は、同じモデルのスケルトンのメッシュを非表示にして表示したものです。
A. 二足歩行モデル B. スケルトンのみ
四足歩行のスケルトンには地面に付く手足が 4 本あります。