コントロール リグおよびキャラクタ タイプの切り替えを、二足歩行と四足歩行の姿勢タイププの切り替えという形で行います。二足歩行と四足歩行のキャラクタは構造的に異なるので、姿勢タイプを変更すると予測しない結果を生じることがあります。
人間の肩を回転するとき、肩は上に向かって動きます。この動きを複製するには、この設定を使用して、上腕を回転するときに肩に適用される回転量を調整します。
たとえば下図の A は、Realistic Shoulder Solving を 0 (無効)に設定した上腕を回転させたときのキャラクタを示したものです。上腕を回転させたときの回転が、肩のボーンに適切に転送されず、ぎこちない動きになります。
下図の(B)では、Realistic Shoulder Solving を 100 (フル)に設定してキャラクタの上腕を回転させています。上腕を回転させたときの回転が 100%適切に肩のボーンに転送されています。肩のボーンが回転するため、キャラクタの肩が人間の肩と同じように上に動いています。

上腕の回転 A. Realistic Shoulder Solving をオフ(0 に設定)した場合 B. Realistic Shoulder Solving をフル(100)に設定した場合
Special スロット グループの Hips Translation オブジェクトを定義した場合、Hips Translation Mode 設定で回転データをそのオブジェクトに適用するかどうかを選択できます。
Hips Translation モードに World Rigid を選択すると、回転データは Base スロット グループで定義された Hips オブジェクトのみに適用されます。Hips Translation モードに Body Rigid を選択すると、回転データは Base スロット グループで定義された Hips オブジェクト、そして Special スロット グループで定義された Hips Translation オブジェクトに適用されます。
この設定は、モデルのヒップを移動するための 2 番目のオブジェクトを定義しており、2 番目のオブジェクトに回転データを受信させない場合に便利です。
この設定を使用するには、Hips Translation オブジェクトを定義する必要があります(「Special」を参照)。
| 設定 | 説明 |
|---|---|
| Body Rigid | 回転を Hips オブジェクトと Hips Translation オブジェクトの両方に送ります。 |
| World Rigid | 回転を Hips オブジェクトだけに送り、Hips Translation オブジェクトには送りません。 |
旧バージョンの MotionBuilder で作成したプロジェクトを使用している場合には、このオプションをオンにします。このオプションをオンにすると、コントロール リグのリファレンス オブジェクトがキャラクタの Reference オブジェクトにコンストレインされます。
キャラクタの脚や腕を操作したときに、膝や肘の曲がり方を変更できます。
これらのオプションは、フラミンゴやダチョウなどの鳥をアニメートするときに役立ちます。
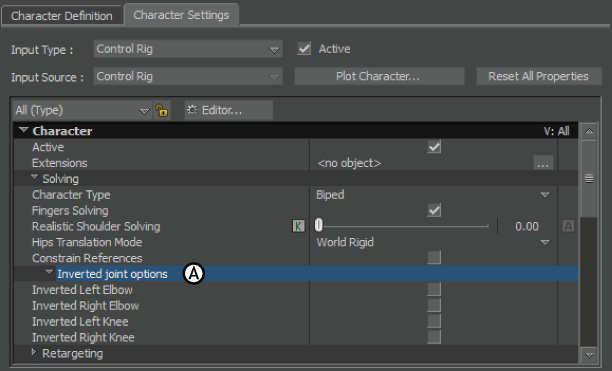
Character Settings A. Inverted joint Options
| オプション | 説明 |
|---|---|
| Inverted Left/Right Elbow | オンの場合、腕を操作するとキャラクタの左右の肘が反対に曲がります。オフの場合、キャラクタの左右の肘は自然に曲がります。 |
| Inverted Left/Right Knee | オンの場合、脚を操作するとキャラクタの左右の膝が反対に曲がります。オフの場合、キャラクタの左右の膝は自然に曲がります。 |
以下の図では、Inverted Left Knee をオン(A)とオフ(B)にして左脚を操作しています。
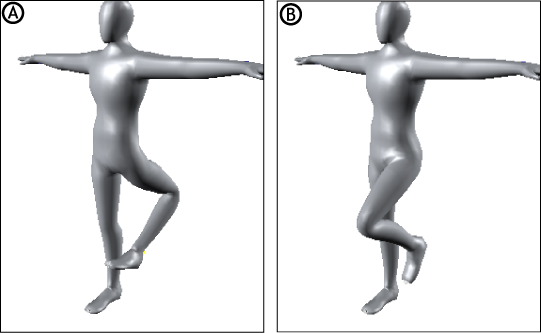
左脚の操作 A. Inverted Left Knee がオンの場合 B. In erted Left Knee がオフの場合
以下の図では、Inverted Left Elbow をオン(A)とオフ(B)にして左腕を操作しています。

左腕の操作 A. Inverted Left Elbow がオンの場合 B. Inverted Left Elbow がオフの場合







