The Rigid Body constraint creates a Rigid body using the specified sources. This is the same as creating Rigid bodies in the Optical settings, only the constrained object is placed at the center of the source objects. The positions of two or more objects are used to adjust the translation and rotation of a constrained object.
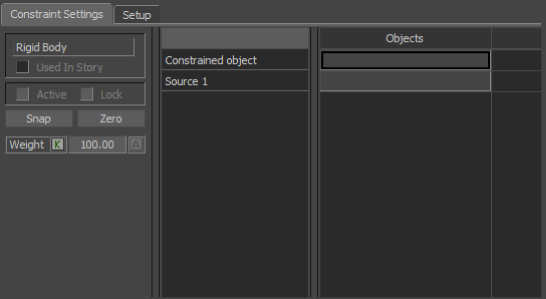
Rigid Body constraint
When you drag an object into the Source 1 cell, another source is added to the Objects pane. If you drag a second source into Source 2, the position and rotation of the constrained object is derived from the position of the two source objects.
The Rigid Body constraint is similar to the Position constraint, except that rotation is also applied to the constrained object. For example, if the Source 1 marker is translated, the constrained object is rotated ( ).
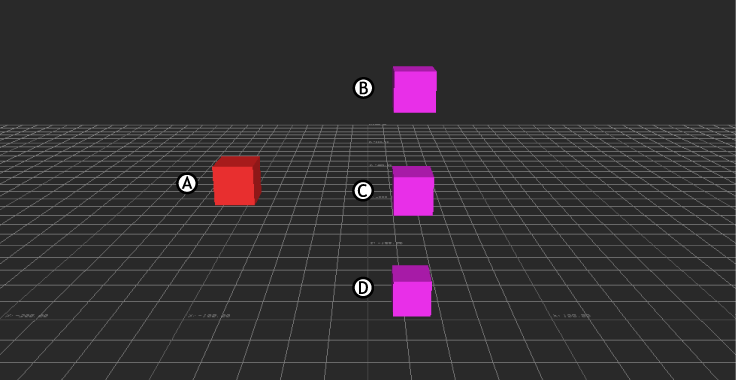
Rigid Body constraint with three source objects. Before activation, the constrained object (A) does not move B, C, and D.
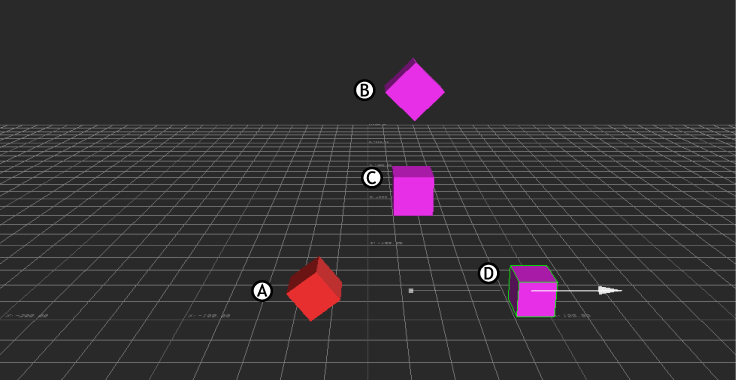
The constrained object (A) and Source objects B and C are automatically translated and rotated based on the new position of Source object D.
 Except where otherwise noted, this work is licensed under a Creative Commons Attribution-NonCommercial-ShareAlike 3.0 Unported License
Except where otherwise noted, this work is licensed under a Creative Commons Attribution-NonCommercial-ShareAlike 3.0 Unported License







