この手順では、キャラクタ エクステンションを含むキャラクタにいくつかのボディ全体のポーズを作成して、歩行サイクルを作成します。
キャラクタの配置:
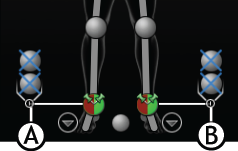
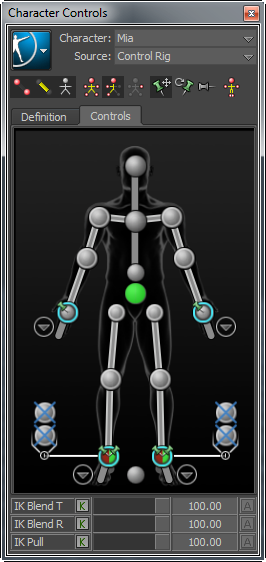
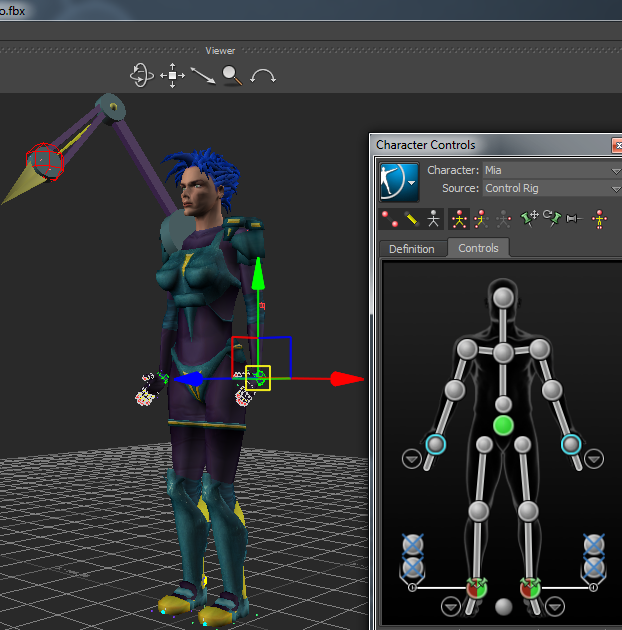
- Character Controls ウィンドウで、各足首エフェクタの上のプラス記号(+)をクリックして、両方の補助ピボットを展開します。これにより、Mia の足首が移動(T)および回転(R)でピンされます。
- Ctrl キーを押しながらクリックして、手首エフェクタと足首エフェクタを選択します。
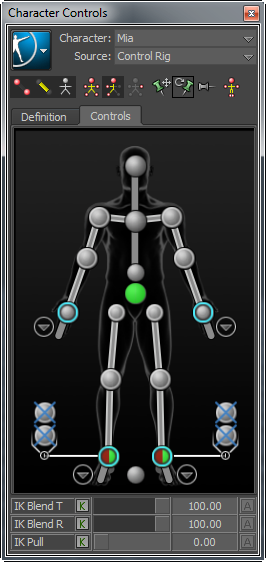
- T および R エフェクタのピン オプションを無効にします。
注:回転が確実に無効になるように、R(回転ピン)のオンとオフをもう一度切り替えなければならない場合があります。
キャラクタ表現のどのエフェクタにも T または R がないことを確認します。
- Character Controls ツールバーの Full Body キーイング モード(
 )が有効になっていることを確認します。
)が有効になっていることを確認します。
この Full Body キーイング モードでは、ペーストしたポーズはキャラクタのボディ全体に配置され、キーフレームはすべてのエフェクタに配置されます。
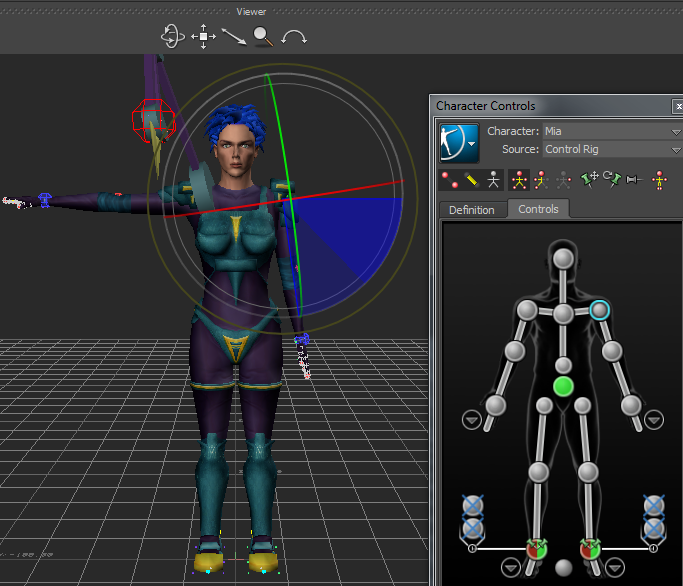
- Character Controls ウィンドウで、左肩エフェクタを選択します。
- Viewer ウィンドウの上にカーソルを移動し、R キーを押して、Mia の左腕が体の脇の、より自然な位置に来るまでエフェクタを回転させます。
- 右肩エフェクタに対しても同じ操作を実行します。
- Ctrl キーを押しながら両方の手首エフェクタをクリックし、Y 軸上で上方向に移動して、肘を自然に曲げます。
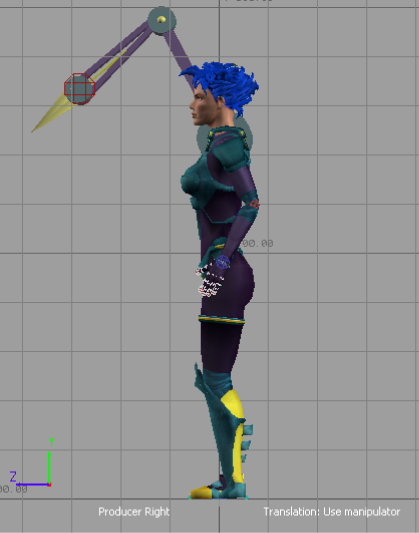
- Viewer ウィンドウの空の領域をクリックし、手首エフェクタを選択解除して、キャラクタの側面が表示されるカメラ ビューを選択します。たとえば、Ctrl + R キーを押すと、Producer Right カメラ ビューに切り替えることができます。
注:見やすいように、適宜カメラ ビューを切り替えてください。
歩行サイクルの最初のポーズを作成するには:
- Character Controls ウィンドウで、右足首エフェクタを選択し、膝が曲がるように、足を(Z 軸上の)前方向およびやや上方向に移動します。
- 左足首エフェクタを選択し、Mia が歩いているように見えるように、Mia の両足が離れて両膝が曲がるまで、左足首エフェクタを後方にスライドさせます。
注:足首エフェクタ ピボットを選択して、Mia の足首を曲げることができます。
- Mia が自然に腕を振っているように、右肩エフェクタを選択し、右腕を後方にわずかに回転させます。次に、左肩を選択して、左腕を前方に回転させます。
- ヒップ エフェクタを選択し、Mia の歩幅が中程度になるように、Mia のボディを上方向または下方向に移動します。座標変換の結果、Mia がフロア(床面)から浮いてしまった場合はいつでも、ヒップ エフェクタを選択し、Mia を下方向に移動できます。既定のフロア
コントロール マーカーにより、Mia の足は自然に既定のフロアに合わせて動作します。
このポーズでは、Mia の右脚から前進歩行モーションが始まります(次の図を参照)。
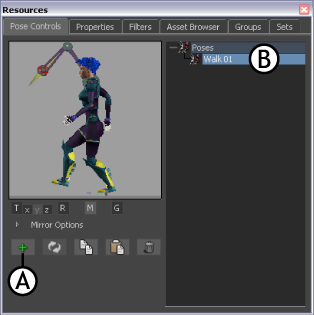
- Resources ウィンドウで、Pose Controls タブをクリックし、Create
 をクリックします。
をクリックします。
Pose ブラウザにポーズが追加されます。
キャラクタ エクステンションの位置は、このポーズの Mia のボディの位置に含まれます。
- Pose ブラウザで Poses フォルダを展開し、ポーズを表示します。
- 作成したポーズを右クリックし、Rename を選択して名前を「Walk 01」に変更します(B)。
歩行サイクルの 2 つ目のポーズの作成:
- 次の図のように見えるように、Mia の脚と腕を配置します。
- 右足首エフェクタを選択し、Mia の足が地面に着くまで後下方にスライドさせます。
- 次に、勢いを出すために、左足首エフェクタを選択し、Mia の背後の位置まで後方にスライドさせます。
- ヒップ エフェクタを調整し、Mia の膝を不自然でない程度に曲げます。
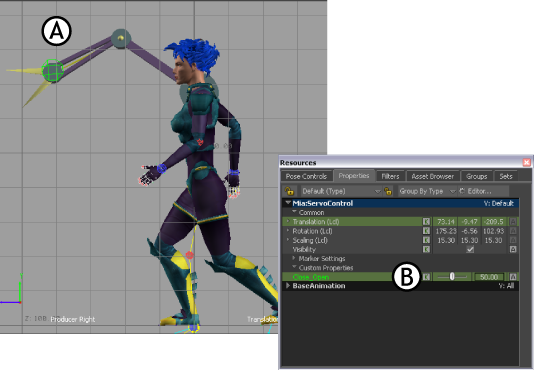
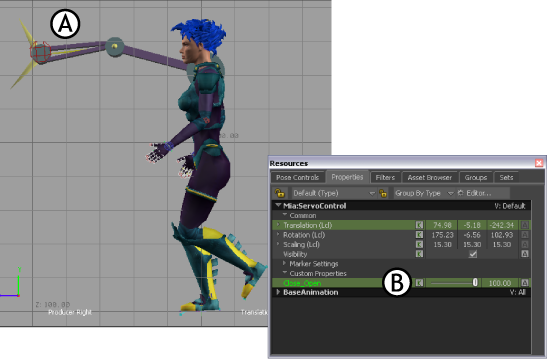
- Mia:ServoControl エフェクタを選択し、Mia の正面に来るようにサーボ アームを移動します。
- Mia:ServoControl エフェクタが選択されている状態で Asset Browser の Properties タブをクリックし、Close_Open プロパティ(B)を使用してハサミを半分開きます(次の図を参照)。
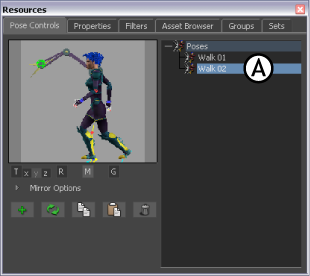
- Pose Controls で Create をクリックし、このポーズに「Walk 02」と名前を付けます(A)。
歩行サイクルの 3 つ目(最後)のポーズの作成:
- 次の図のように見えるように、Mia の脚と腕を配置します。
- Mia:ServoControl エフェクタを選択し、サーボ アームを、Mia の前方まで、さらに伸ばします。
- Mia:ServoControl が選択されている状態で、Properties ウィンドウの Close_Open プロパティを使用してハサミをさらに開きます(B)。
このポーズでは、左脚は後方に移動し、サーボ アームは前方に移動します。これにより、歩行サイクルの前半の 1 歩が完成します。
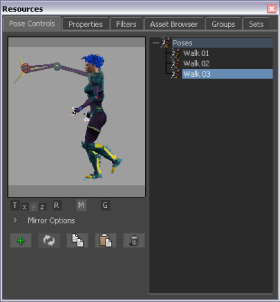
- Pose Controls で Create をクリックし、このポーズに「Walk 03」と名前を付けます。
現在、シーンには、3 種類のポーズがあります。3 つのポーズが、Pose ブラウザにリストされています。