Before you characterize a model, it must be in a T-stance or rest pose, and it must be facing the positive Z-axis.
For biped models, the rest pose is a T-stance with all fingers and thumbs out straight. For quadrupeds, it is a stance where the model’s four limbs and all toes point towards the floor.
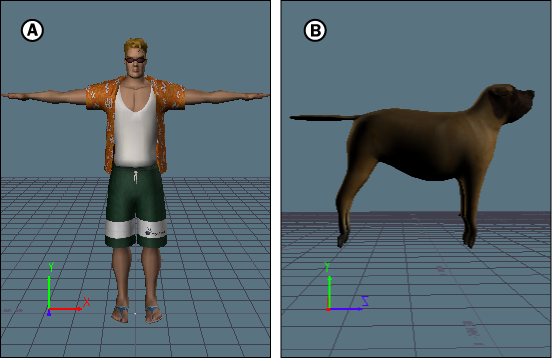
Stances A. Biped T-stance B. Quadruped stance
This stance is important because when you characterize a model, MotionBuilder takes the model’s current pose as the starting pose. All future movement is based on this starting pose.
The T-stance (or rest pose) is often used as the default position for a character. For example, Ragdoll solves recommend that characters are in the T-stance for pose matching.






 > Source > Stance.
> Source > Stance.