
定義(Definition)タブを使用してキャラクタのスケルトンのボーンを HumanIK ソルバが認識できるノードにマップするには、キャラクタを基本の T スタンスにセットアップして、キャラクタのスケルトンのプロポーションとジョイントのトランスフォームに関する重要な情報を HumanIK に提供する必要があります。
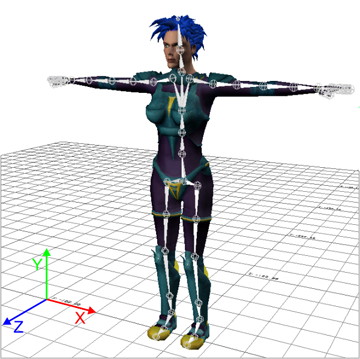
IK ソルバとリターゲッティング ソルバがキャラクタに対して正確な結果を生成するようにするには、キャラクタの T スタンスを、次の説明や例に可能なかぎり近い状態にする必要があります。T スタンスが適切に構成されていないと、ソルバの操作はすべて欠陥データに基づくものになり、ポーズが歪む、不自然になる、予期せぬポーズになるといった結果につながります。
HumanIK を使用すると、二足歩行だけでなく四足歩行も制御できます。四足歩行のキャラクタをキャラクタ化する場合、キャラクタのスケルトンを、上記と同じ T スタンスにセットアップする必要があります。この二足歩行用 T スタンスは四足歩行には不自然でそのまま利用することはできませんが、HumanIK がキャラクタのスケルトンのプロポーションで適切にセットアップされるようにするには、キャラクタを二足歩行用のスタンスにセットアップする必要があります。






