






Before you can use the Characterization Tool to map the bones in your character's skeleton to the nodes understood by the HumanIK solver, you must set up your character in a basic T-stance that provides HumanIK with crucial information about the proportions of your character's skeleton and its joint transforms.
Your character's T-stance must match the description and example given below as closely as possible in order for the inverse kinematics and retargeting solvers to produce accurate results for your character. Without a properly configured T-stance, the solvers will base all of their operations on faulty data, and will likely produce skewed, awkward or unexpected poses.
The T-stance has the following requirements:
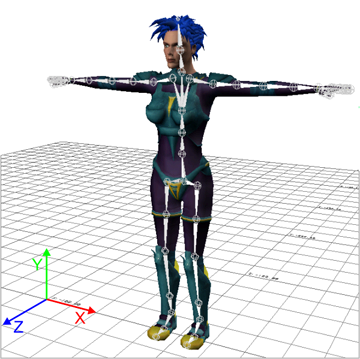
A typical T-stance is shown in the following image:
HumanIK can be used to control quadrupeds as well as bipeds. If you are creating a characterization for a quadruped character, you must set up the character's skeleton in the same T-stance shown above. Although this biped T-stance is awkward for a quadruped, you must set up your character in this biped stance in order to ensure that HumanIK is correctly set up with the proportions of your character's skeleton.