IK を使用すると、スケルトン内のジョイントの回転をIK ハンドルで制御することができます。スケルトンにポーズを設定するには、IK ハンドルを配置(通常はスケルトンの先端に配置)し、他のジョイントの回転をIK ソルバで自動的に計算させます。以下の手順では、IK をスケルトン階層に適用します。
 を選択します。
を選択します。
ジョイント ツール(Joint Tool)の IK ハンドル ツールの設定(IK Handle Tool Settings)ウィンドウが表示されます。マウス ポインタが正投影ビューにあるときは、そのツール用の十字カーソルに変わります。

ikSCsolver 設定で、IK シングル チェーン ソルバが選択されます。このソルバで、スケルトン内のジョイントが確実に 1 つの平面に平行に配置されます。メカニカル アームは実際の腕のようにねじる必要がないため、このソルバが非常に適しています。
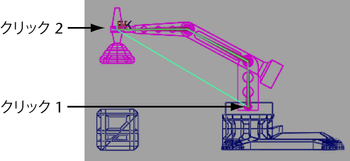
側面ビューで、IK ハンドルは IK チェーンのスタート ジョイントとエンド ジョイントから伸びた線として描画されます。
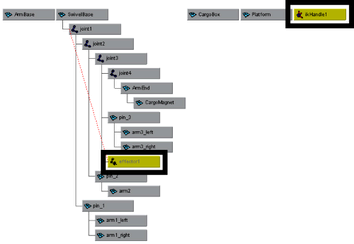
ハイパーグラフで、IK チェーンを示す 2 つの新しいノード(IK ハンドル ノードと終了エフェクタ ノード)が階層内に表示されます。
IK ハンドルは、IK ソルバで IK チェーン内のジョイントの回転を計算するために(終了エフェクタと組み合わせて)使用されます。デフォルトでは、IK ハンドルはシーン ビュー内の IK チェーンの最後のジョイントに配置されます。
次の手順では、コントロール オブジェクトを使って IK ハンドルを操作する方法について説明します。





