A rigid body is an object in the physical simulation whose shape and size do not change. For instance, if you make a cylinder in your scene into a rigid body, it might bounce, roll, and slide around, but it never bends or snaps, no matter how much force is applied.
You can join multiple rigid bodies in a scene with constraints. For example, say you've added a door to your scene and made it a rigid body. It might start out precariously balanced upright in the door frame, but anything that bumps the door will make it fall flat on the floor. To hold the door onto the frame while allowing it to open and shut, you can use a hinge constraint.
Physical Meshes versus Graphical Meshes

A graphical mesh (teapot) and its simplified physical mesh
Without MassFX, every mesh in your scene is a graphical mesh: the visual representation of your object. To optimize a graphical mesh for a real-time game or faster render times, you would edit its polygons.
For physical simulation, you also want to be able to control the amount of information being processed. Often, the amount of information needed for simulation is far less than you need for the graphical representation. For example, as depicted in the preceding illustration, a (graphical) teapot might be represented by a simple convex (physical) mesh in the physics simulation.
A physical mesh might be a collection of polygons, such as the one for the teapot, or it could be a simpler built-in shape. The available shapes in MassFX are Sphere, Box, and Capsule. Whenever possible, use these shapes for your physical mesh, because they are both smoother and faster than a polygonal representation.
For example, a beach ball with a faceted convex hull for a physical mesh will roll unevenly on the ground. Using a Sphere for the physical mesh will cause it to roll smoothly and yield better performance.
Composing the Physical Representation
At this point, you might be asking: Beyond spherical beach balls and boxy crates, of what use are the simple shapes? Simulating a teapot as a sphere, box, or capsule is not very realistic.
The answer lies in the ability to compose shapes. While the most common case is a single physical mesh for a single graphical mesh, it is possible to use any number of physical meshes to represent a single graphical mesh.
The following illustration shows a single graphical mesh for a wooden table. The single convex hull (the teal box), might work for the simulation as long as you don't need any chairs sitting at the table or objects trying to roll underneath it. If you do, and because dynamic rigid bodies can't use concave meshes (see the next section), you need to compose the physical representation from a set of joined physical meshes.
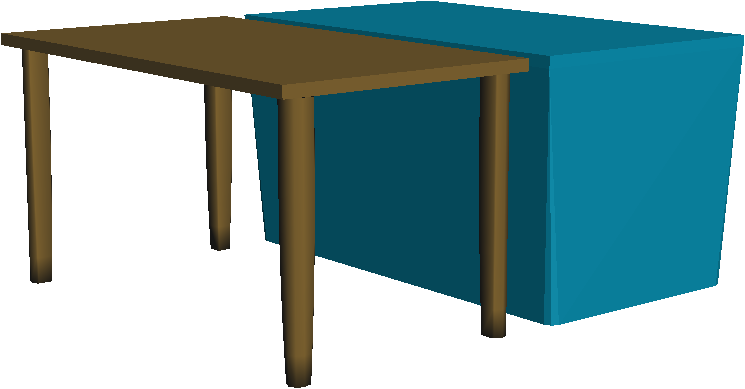
Table graphical mesh with convex physical mesh
The next illustration shows the same table using one box and four capsule shapes for the physical representation.

Table graphical mesh with multiple physical meshes
For more information on adding multiple physical meshes to a rigid body, see the Physical Meshes rollout help.
Rigid Body Types: Dynamic, Kinematic, and Static
Every rigid body in the simulation can be only one of three types. For your convenience, there is a button for each of these types on the rigid body flyout on the MassFX toolbar. However, you can change the type of a rigid body after creation.
 Dynamic Dynamic rigid bodies are much like objects in the real world. They fall with gravity, bump into other objects and can be
pushed by those objects. The physical representation of the object is moved by the simulation, and the graphical mesh in the
scene is updated from that. Concave physical meshes cannot be used for dynamic rigid bodies.
Dynamic Dynamic rigid bodies are much like objects in the real world. They fall with gravity, bump into other objects and can be
pushed by those objects. The physical representation of the object is moved by the simulation, and the graphical mesh in the
scene is updated from that. Concave physical meshes cannot be used for dynamic rigid bodies.
 Kinematic Kinematic rigid bodies are puppets moved by the strings of your animation. They do not fall with gravity. They push any dynamic
objects they encounter, but cannot be pushed by other objects. The graphical mesh is controlled by 3ds Max (animated or not), and this in turn controls the transform of the physical mesh that represents the object in the simulation.
Concave physical meshes cannot be used for kinematic rigid bodies.
Kinematic Kinematic rigid bodies are puppets moved by the strings of your animation. They do not fall with gravity. They push any dynamic
objects they encounter, but cannot be pushed by other objects. The graphical mesh is controlled by 3ds Max (animated or not), and this in turn controls the transform of the physical mesh that represents the object in the simulation.
Concave physical meshes cannot be used for kinematic rigid bodies.
 Static Static rigid bodies are similar to kinematic, except that they cannot be animated. A dynamic rigid bodies can bump into a
static rigid body and bounce off of it, but the static rigid body never reacts. Static objects are useful both for performance
optimization and also because concave meshes can be used for them.
Static Static rigid bodies are similar to kinematic, except that they cannot be animated. A dynamic rigid bodies can bump into a
static rigid body and bounce off of it, but the static rigid body never reacts. Static objects are useful both for performance
optimization and also because concave meshes can be used for them.





