The kinematic chain is automatically defined using the object you select as the end effector and working up the hierarchical tree to use the root object as the base of the kinematic chain. Sometimes you might not want the kinematic chain to go all the way to the root of the hierarchy. This is especially true when you are animating multi-limbed or branching structures, such as an octopus or a tree.
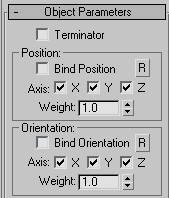
Terminator option in the Object Parameters rollout
You use the Terminator option in the Object Parameters rollout to stop calculation of the kinematic chain before it reaches the root object of the hierarchy. A terminator object stops calculation at the terminator's child object; the terminator itself is not affected by the IK solution. This gives you very precise control over the behavior of the kinematic chain.
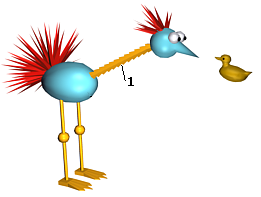
For example, look at the bird in the figure. The bird is linked with its body as the root of the hierarchy. If you use inverse kinematics to move the duck, all objects from the duck to the body will be affected by the IK solution. However, if you define a neck bone as a terminator object, then only the objects from the duck to the neck vertebrae are affected.
With a terminator in the neck, the body of the bird is not affected.
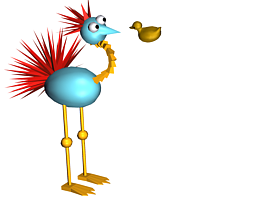
With a terminator in the neck, the body of the bird is not affected.





