CATWindow > Hierarchy panel > Expand the HubGroup hierarchy to which the FootPlatform belongs. > Click the controller to edit.
The FootPlatform is the IK target for the feet. Its motion is critical to the animation of the legs.
A CATRig’s FootPlatform has an animated pivot position to make sure that the foot always rotates around the correct point. The RollPivotPos controller determines the position of the pivot across the X axis of the FootPlatform (or from one side to the other).

A value of 1.0 represents the outside of the foot and a value of 0.0 the inside of the foot platform.
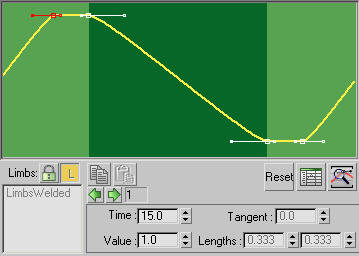
The Roll controller controls the rotation of the FootPlatform along its length.
In the following illustration, the roll starts before the foot leaves the ground and ends after the foot is on the ground. This is a typical scenario.

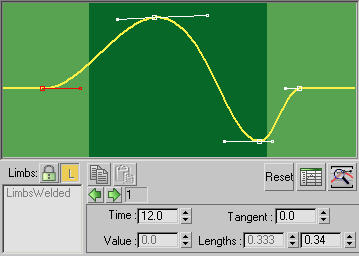
The FootPlatform has an animated pivot position to make sure the foot always rotates around the desired point. The PitchPivotPos controls the position of the pivot along the Y axis of the FootPlatform; that is, along its length.
A value of 0.0 positions the pivot at the heel of the foot platform, and a value of 1.0 positions the pivot at the toe.
For a human, this setting typically animates between the toe (1.0) for lift and the heel (0.0) for plant, as shown in the following illustration.
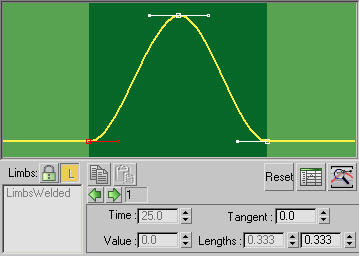
As with the standard Pitch controller, FootPlatform Pitch controls the angle of the FootPlatform along its length (Y axis). It is used to control the angle of the foot as it lifts off and slaps down, as shown in the following illustration.
FootPush is a cyclic positional offset along the Y axis that enables you to throw the FootPlatform forward during the walk cycle.
The Swerve controller is actually the same as the WeightShift controller. It controls the side-to-side (X axis) positional cycle for the FootPlatform.

The StepShape controller controls the velocity of the FootPlatform as it moves through the air. In other words, it controls the ease-in and ease-out of the FootPlatform’s motion.






