





Basic Manual 3D Tracking
Manual 3D tracking is computed by generating an orientation based on the trackers you defined. This orientation is defined by keyframes. The manual 3D tracker creates keyframes with the 3D track points.
Once keyframes and 3D points are computed, the intermediate frames are computed by first interpolating between the keyframes, and then refining the camera properties using the estimated 3D point information.
You do not need to specify a coordinate system to create manual 3D tracking.
To compute basic manual tracking:



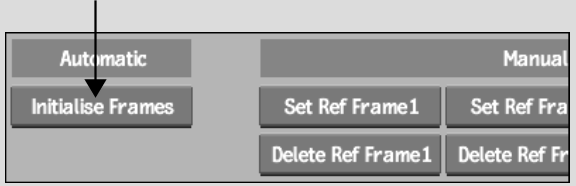
Initialise Frames verifies that there are enough trackers in the scene and checks that there is enough spacing between the defined trackers. If you have not placed sufficient trackers in your scene, you will get an error message.
If you have enough trackers, the scene will be tracked and keyframes will be created for the camera. These keyframes can also be adjusted manually.

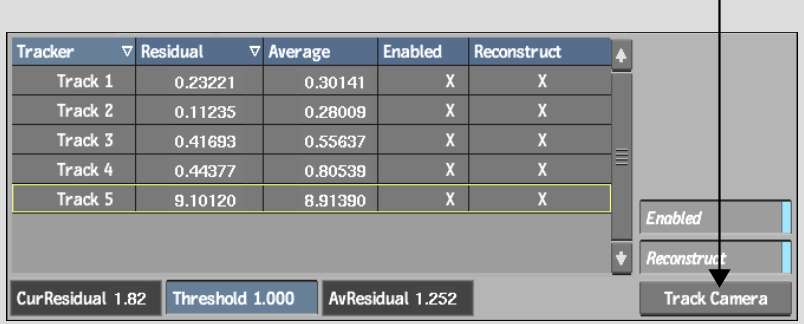
Tracking the camera computes the 3D coordinates of the points that you tracked earlier. The manual 3D tracking analysis also calculates the tracking coordinates of the two references frames, the keyframes, and all the frames in the clip.
In general, you should let the manual 3D tracker choose the keyframes when you click the Initialise Frames button. In cases where the camera motion is jittery, you can position the keyframes manually. Ideally, adjust your 2D tracks in the Stabilizer to ensure the camera motion is as smooth as possible.
You can change the number of keyframes and you can specify your own keyframes. If you specify your own keyframes:
Once the manual 3D tracking is computed, you can specify a coordinate system and apply it without resolving the tracking again. The camera and resulting axes are re-oriented without recomputing the tracking.