在以下的步骤中,将使用 Hypergraph 来查看机械臂的层次。“Hypergraph”是显示场景层次的图形视图的场景管理编辑器。Hypergraph 可使您更轻松地创建、理解和管理场景中对象和节点的层次。
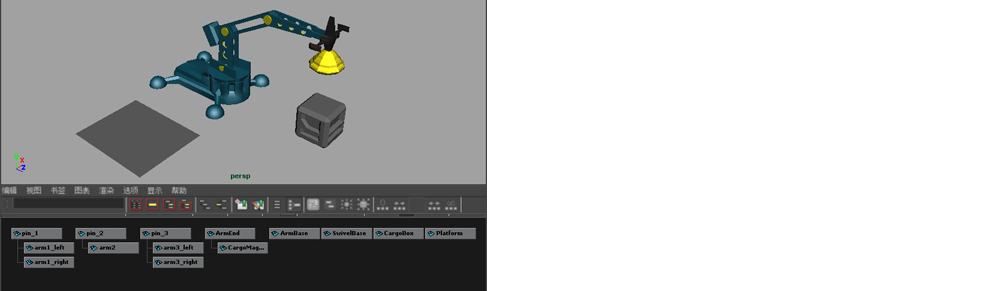
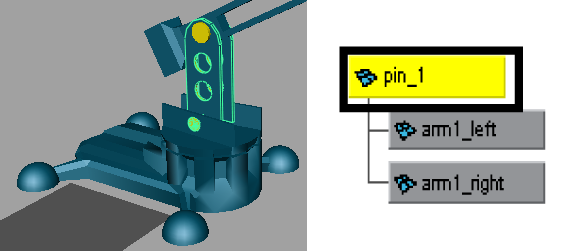
框表示场景中各种项目的节点。已将场景中的某些项目设定为层次的子对象。这由连接某些节点的线表示。选择“Hypergraph”中的节点也会选择场景视图中的项目。
层次将各种对象组合成机械臂的离散组件,即基础、下臂、中间臂,上臂等。如果选择并旋转层次中的任何父节点,其他手臂组件不会跟随,因为这些手臂组件没有组合到一个统一层次中。