“反向运动学”(Inverse Kinematics) (IK) 可用于高效地为动画的模型和角色设定姿势。可通过定位 IK 控制柄为骨架设定姿势,IK 控制柄通常位于 IK 关节链的末端(例如,位于手上)。IK 解算器会自动计算其他关节的旋转。IK 解算器根据 IK 控制柄的位置计算为关节链层次提供支撑的每个关节的旋转。有关骨架和关节的详细信息,请参见创建骨架层次。
相反,“正向运动学”(Forward Kinematics) (FK) 需要您依次旋转每个关节,直到针对某个关键帧获得所需姿势。为复杂骨架设定姿势时,这会是一个让人感觉乏味的过程。使用“反向运动学”(Inverse Kinematics)时,可以更快速地为角色设定姿势,因为会根据“IK 控制柄”(IK Handle)的放置自动计算层次中更上方的关节旋转。在相同骨架上同时使用 FK 和 IK 方法称为 FK/IK 混合。
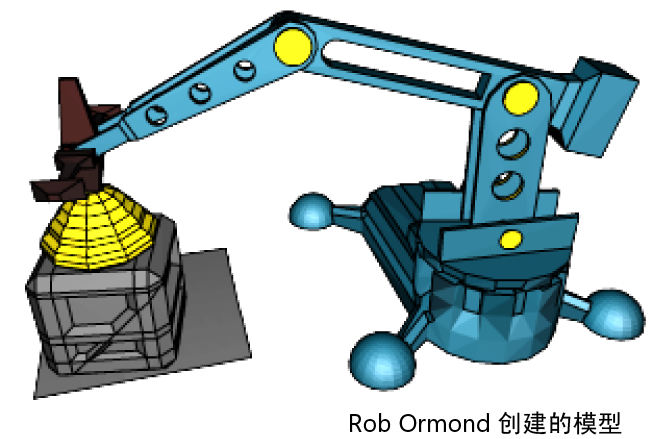
很明显 IK 可用于为拥有骨架的动画角色(两足、四足等)设定姿势,并且还有其他一些应用,例如,在类似机械的模型中为骨架设定姿势。
本课程的目标是为机械臂设定动画,使其伸到货箱上方的某个位置,然后拾取货箱并将其移到另一个位置,接着再放下货箱。
完成本课程后,您将了解很多有关骨架层次、IK 和父约束的基本功能。要求具备模型和 IK 的某些初始设置,以便为其设定姿势和关键帧,从而提供逼真的动画。







