The main goal of the matchmoving is to compute both the camera motion and the scene. If you know some of the properties of
a scene, because you took measurements, or you have some constraints, you may know the 3D coordinates of some points of the
scene. Instead of letting MatchMover compute their 3D coordinates, you can set them before the computation. Setting these
"3D Survey points" has several advantages:
- The coordinates of the points at the end of the computation will be exactly what you entered.
- The points help MatchMover automatically finding the appropriate coordinate system that matches your measurements of the scene.
- The computation will be more robust, as all the survey points will help MatchMover finding other points in the scene.
A minimum of four survey points is required to define the coordinate system. You can either set these coordinates manually
or use one of your 3D object vertex coordinates.
Setting survey points manually
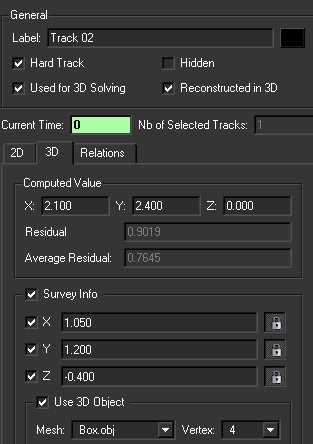
- Select a track. The track’s properties are shown in the Parameters Window.
- Check the Survey Info options and either enter each known 3D coordinates directly in the corresponding edit box or check the Use 3D Object option, then select a 3D object in the Mesh drop-down list and a Vertex number. You can view the vertex number by selecting Display > Mesh Vertices to toggle the display of each vertex index of a 3D object from "none", through "selected vertices" to "all vertices".
- Click the Use Object Transform checkbox if you want to be able to alter the original shape of your object.
- Click Commit Changes to validate.
Setting survey points using elastics
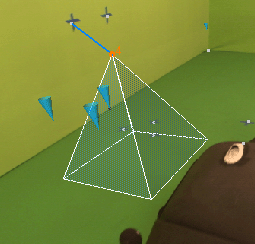
You can create a survey point simply by using a 3D object vertex.
In a 3D View, select the object. Drag the vertex to a position on the background image or an existing track point to make a link. You
can then fine-tune its 2D position by clicking in the Magnifier window.
A new survey point is created with coordinates mapped on the 3D object’s selected vertex. The mappings can be edited in the
Parameters Window. See Setting survey points manually.
Tip When drawing an elastic from a large object to the image plane is complicated, you can select the vertex you want to link
and check the Use 3D Object option in the 3D tab of the track Parameters window. The selected vertex creates a new survey point with coordinates mapped on the 3D object’s selected vertex.