Child–>Parent precedence causes joints closest to where a force is applied (the end effector) to move more than joints that are farther away from the force. Like the default precedence, Child->Parent precedence produces a natural result that is suitable for many IK solutions.
The difference is that Child−>Parent precedence assigns unique values to each object in the kinematic chain (default precedence uses the value of 0 for every object). Child−>Parent precedence is more flexible if you want to go back and manually change precedence values.
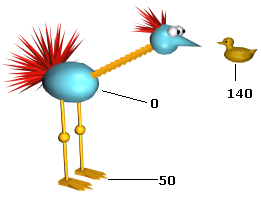
The first figure shows values for child-to-parent precedence.
The first figure shows values for child-to-parent precedence.
Assigning Child->Parent Precedence
Clicking Child−>Parent sets joint precedence based on a child having a higher precedence than its parent. The values are calculated by setting the root of the entire hierarchy to a precedence value of 0 and each child to a value equal to 10 times its depth from the root.
You almost always assign Child->Parent precedence to an entire kinematic chain. The chain for the structure in the figure uses the body as the root object and the duck as the end effector.
Each object receives a value equal to its depth from the root of the hierarchy times 10. Note that precedence value calculation is based on the root of the hierarchy whether or not the root is selected as part of the kinematic chain.
You might want to assign Child->Parent precedence to just a single object in the kinematic chain. For example, if you have been manually changing precedence values, you might want to set an object to its original Child->Parent value. The value assigned to the object is equal to its depth from the root of the hierarchy times 10.





