Soft-body deformations can sometimes give unexpected results, such as strange shapes or transformations, when certain parameters, such as Sampling and Stiffness, have high settings. These parameters are found on the Soft Body page in the Soft Body Operator Property Editor.
To compensate for most of these problems, you can adjust the value for the Iterations per Frame parameter, found on the Simulation page of the SoftBodyOp property editor. This defines the time step between one frame and the other, subdivides this value, and then executes the soft-body simulation. Unlike cloth, soft body uses an explicit method for calculating dynamics, so this parameter is the main factor for giving stability to the simulation.
Generally, high values of Sampling and Stiffness can cause instabilities that can be fixed by raising the value for Iterations per Frame. Of course, when you raise value, it increases calculation time. Start with a low value and bring it up until you get the realistic simulation look you want.
In some cases, you can use settings as low as 2. Tune each soft-body object differently — they probably won't use the same settings. This is highly dependent on the properties you've set, like stiffness and mass.
|
|
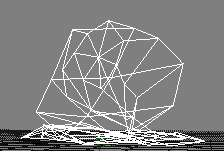
| Strange deformations: Iterations per Frame is set to the default value of 6. |
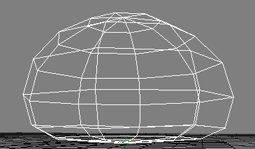
Problem fixed for this object: Iterations per Frame is set to 7. |
High Sampling values cause the lattice to more closely resemble the volume of the object to be deformed and thereby create a more realistic result, but these may contribute to the instability of the simulation.
If this happens, you can lower the Stiffness value as well as increase the Iterations per Frame.
High Stiffness values cause the object to better resist deformations, but again, may contribute to instability. If this happens, you can lower the Sampling value or increase the Iterations per Frame.
Select No Stretch to help stabilize the deformation, especially when the soft-body object seems to "explode" after a collision.
 Except where otherwise noted, this work is licensed under a Creative Commons Attribution-NonCommercial-ShareAlike 3.0 Unported License
Except where otherwise noted, this work is licensed under a Creative Commons Attribution-NonCommercial-ShareAlike 3.0 Unported License







