The Velocity/Acceleration Limits on the Rigid Body property page put a soft limit on the maximum velocity and acceleration of a rigid body. Because collisions happen very quickly, they can cause large but accurate accelerations which can make the rigid bodies become unstable when they collide. These parameters can help solve any interpenetration problems of the rigid body geometries in a collision that make them seem to "explode" off into space. Generally, you shouldn't need to set these limits, but they may help solve this type of simulation problem.
To set velocity/acceleration limits
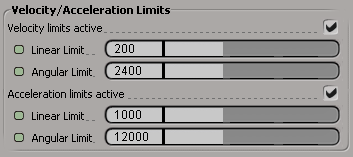
Select Limit velocities and/or Limit accelerations on the Rigid Body property page.
Set the Linear/Angular Velocity/Acceleration Limit values. Linear values are in Softimage units and Angular values are in radians.
If you lower the limits of the rigid bodies' velocity and/or acceleration, you can often prevent the problem of interpenetrating rigid bodies flying off into space or rigid bodies spinning too much after a collision. However, if you lower the limits too much, the interpenetrating rigid bodies may get stuck together during a collision.
Specifically, these limits scale down velocities or accelerations inside the dynamics engine at the end of each substep so that they will not exceed the limit you've set. For example, if you set the linear velocity limit to 100, if, at the end of any substep, the velocity of this object is over (0.5 * 100), the velocity is nonlinearly scaled to between (0.5 * 100) and 100.
The limits are applied at the end of each substep, before Softimage sees anything. So if you have a velocity limit of, say, 50 and a initial velocity of 100, it will travel at the rate of 100 for one step, then the velocity will be scaled back to something between 25 and 50 (around 26, actually) for the next substep.






