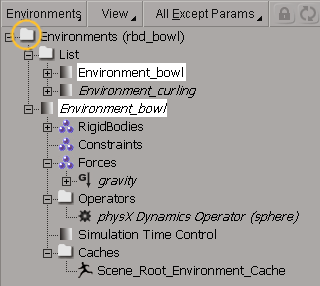
A rigid body simulation is an assembly of different elements that work together as part of an environment: the rigid bodies, forces, rigid body constraint, the dynamics operator, and time controls.
As soon as you create a rigid body, a simulation environment in which the dynamics are calculated is also created. All elements that are part of a rigid body simulation are added to connection groups within a simulation environment. These groups are created for each type of element in the simulation. This environment keeps track of the relationships among objects in the simulation and onto which objects the dynamics operator is applied.
For more information on the simulation environment, see The Simulation Environment.
Rigid bodies are objects which do not deform upon collision. When an object is a rigid body, it has properties such as inertial and collision properties. These properties are used by the dynamics operator to calculate how the object is affected by forces and collisions.

Rigid bodies can be either active or passive. Active rigid bodies are affected by dynamics (forces and reactions to collisions), whereas passive objects are part of the simulation but are not affected by dynamics (they do not move as a result of collisions or forces).
For more information on rigid bodies, see Creating Rigid Bodies.
Constraints between Rigid Bodies
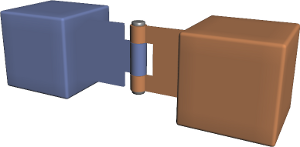
You can set constraints between rigid bodies to limit a rigid body to a specific type of movement. These are not the same type of constraints as discussed in Animating with Constraints; instead, they are a special type of rigid body constraints that include ball-and-socket joints, hinges, springs, sliders, and fixed positions. For example, you can use a hinge constraint to create a door opening on a hinge or the pendulum of a clock swinging back and forth.
For more information on constraints, see Rigid Body Constraints.
Rigid bodies are all collision objects. This is a little different from setting obstacles for other simulations in Softimage because you don't have to define a specific obstacle for an object. Rigid bodies all have the same collision properties to calculate their reactions in a simulation. These properties include elasticity, friction, and the collision geometry type.

For more information on setting the collision properties, see Collisions with Rigid Bodies.
You can apply any force to rigid bodies as you would for any other object in a simulation (only active rigid bodies are affected by forces). When you apply a force, it is added to the Forces group in the current environment and the dynamics solver calculates all active rigid Bodies' movements accordingly. You can also set up the force's weight for each rigid body in the simulation.
For more information on forces, see Applying Forces to Rigid Bodies.
Simulation Playback and Caching
To simply play a rigid body dynamics simulation, you click the play icon in the playback controls or move the playback cursor in the timeline.
To set up the timing of the simulation, however, you use the environment's Simulation Time Control in which you set the duration of the simulation, the playback mode (standard, live, or interactive), and whether to cache the simulation to an action source.
Caching stores the current simulation frames into an action source in the same way that animation is plotted. This is especially useful for trying out different variations of a simulation, and when you want to export the simulation in a model.
For more information, see Playing Back the Rigid Body Simulation and Caching Non-ICE Rigid Body Simulations.






