The Chain IK constraint uses Inverse Kinematics to constrain the movement of the elements in a bone chain, or hierarchy, so that the end node reaches toward the position of another object, defined as the object assigned to the constraint’s Effector cell.
For more on configuring elements of the bone chain, see Chain IK properties.
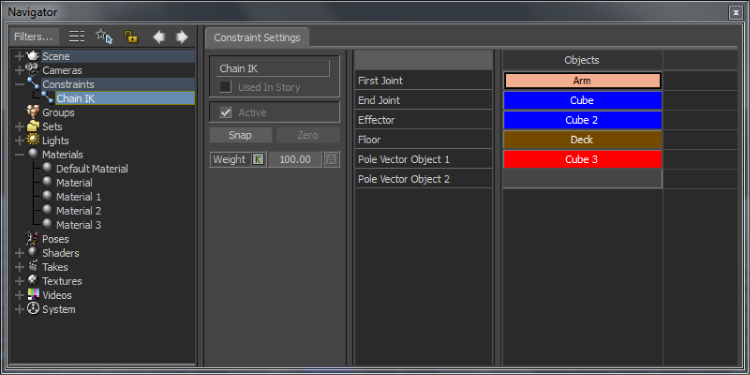
Chain IK constraint
The object that the IK chain tries to reach. Clicking Snap in the constraint settings moves the effector object to the position of the last node of the chain.
The Pole object is used to specify an object that the chain is to aim at. For example, in a leg chain, you can use an object to orient the bending of the knee in a specific direction.
 Except where otherwise noted, this work is licensed under a Creative Commons Attribution-NonCommercial-ShareAlike 3.0 Unported License
Except where otherwise noted, this work is licensed under a Creative Commons Attribution-NonCommercial-ShareAlike 3.0 Unported License







