







There are different types of optical motion capture system, but they all work in essentially the same manner. Each type uses a series of cameras placed at different angles to track the position of reflective sensors attached to a performer.
Even if you are using optical data files that were captured by someone else, it is useful to know the basics of optical data.
Optical data are sets of translation data. This data consists of many different points with only translations and no rotation or scale data.
To extract rotation data used to position an unlabeled (occluded) marker, you create a Rigid body which is a collection of at least three sensors that define a solid body part. For example, many optical capture setups define four markers for the head.
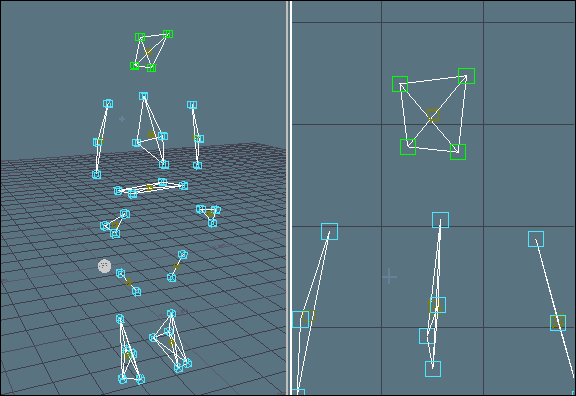
Selected four markers define the head Rigid body
As the head is tilted, some sensors move up while others move down. When the four optical markers are grouped as a Rigid body, this translation is interpreted as rotation and is indicated by the marker in the center of the Rigid body.
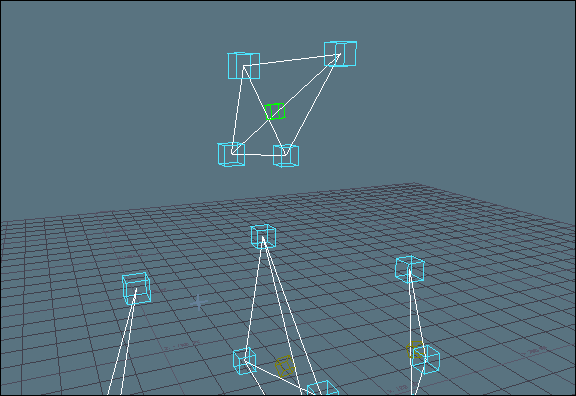
Center Rigid body marker indicating rotation
Rigid bodies are also an important part of correcting occlusion and partial occlusion. Since an occluded or unlabeled marker is connected to other optical markers, the optical system attempts to calculate the position of the occluded marker based on the other markers in the Rigid body. This calculation may not be sufficiently accurate and may need to be corrected manually.
 Except where otherwise noted, this work is licensed under a Creative Commons Attribution-NonCommercial-ShareAlike 3.0 Unported License
Except where otherwise noted, this work is licensed under a Creative Commons Attribution-NonCommercial-ShareAlike 3.0 Unported License