The following Chain IK constraint properties are included with bones when you use the Chain IK constraint.
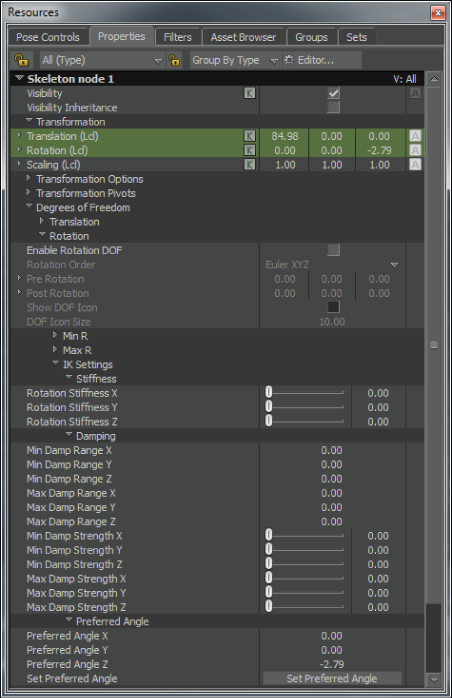
Chain IK constraints bone properties
| Chain IK Setting | Description | Note |
|---|---|---|
| Rotation Stiffness X, Y, Z | The current node's resistance to movement. | Rotation Stiffness can be set in the X, Y, and Z axes. |
| Min Damp Range X, Y, Z | The angle used by the IK chain to create resistance for joint movement when it approaches the lower boundary or the minimum of its limits. | The Min Damp Range can be set in the X, Y, and Z axes. Use the Min Damp Range setting to create slow joint motion until the joint reaches its movement limits and comes to a gradual stop. |
| Max Damp Range X, Y, Z | The angle used by the IK chain to create resistance for joint movement when it approaches the upper boundary or the maximum of its limits. | The Max Damp Range can be set in the X, Y, and Z axes. Use the Max Damp Range settings to create slow joint motion until the joint reaches its movement limits and comes to a gradual stop. |
| Max Damp Strength X, Y, Z | The IK chain’s resistance to joint movement as it approaches the upper boundary or the maximum of its limits. | The Max Damp Strength can be set in the X, Y, and Z axes. Use the Max Damp Strength setting to define the Max Damp Range’s deceleration. |
| Min Damp Strength X, Y, Z | The IK chain’s resistance to joint movement as it approaches the lower boundary or the minimum of its limits. | The Min Damp Strength can be set in the X, Y, and Z axes. Use the Min Damp Strength setting to define the Min Damp Range’s deceleration. |
| Preferred Angle X, Y, Z | The preferred rotations of the joint. | The Preferred Angle can be set in the X, Y, and Z axes. In the Chain IK Constraint Settings, click Snap to set all nodes to their current rotation value. |
| Set Preferred Angle | Defines and applies the preferred rotations of the joint in the X, Y, and Z axes that are defined in the Preferred Angle X, Y, and Z settings. | When you build a skeleton, you should create the joints so they are oriented at the angles you would want them to move in during IK. |
 Except where otherwise noted, this work is licensed under a Creative Commons Attribution-NonCommercial-ShareAlike 3.0 Unported License
Except where otherwise noted, this work is licensed under a Creative Commons Attribution-NonCommercial-ShareAlike 3.0 Unported License







