Characterization Tool を使用してキャラクタのスケルトンのボーンを HIK ソルバによって理解されるノードにマッピングする前に、HIK にキャラクタのスケルトンやジョイント変換の比率に関する重要な情報を提供する基本的な T-スタンスでキャラクタをセットアップする必要があ ます。
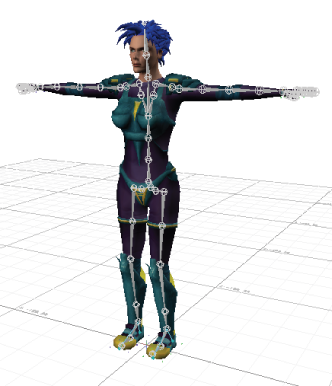
インバース キネマティクスとリターゲッティング ソルバがキャラクタに対して正確な結果を生成できるようにするには、キャラクタの T-スタンスが以下に示す説明および例に可能なかぎり一致している必要があります。T-スタンスが正しく設定されていない場合、ソルバはすべての操作を誤ったデータに基づいて行い、歪んだポーズ、ぎこちないポーズ、または予期せぬポーズを生成する可能性があります。
HIK を使用すると、二足歩行だけでなく、四足歩行も制御できます。四足歩行のキャラクタのキャラクタライズを作成する場合は、先ほどと同じ T-スタンスでキャラクタのスケルトンをセットアップする必要があります。この二足歩行の T-スタンスは四足歩行ではぎこちなくなりますが、キャラクタのスケルトンやジョイント変換の比率で HIK が正しく設定されるようにするには、この二足歩行スタンスでキャラクタをセットアップする必要があります。





