A pole vector constraint causes the end of a pole vector to move to and follow the position of an object, or the average position of several objects.
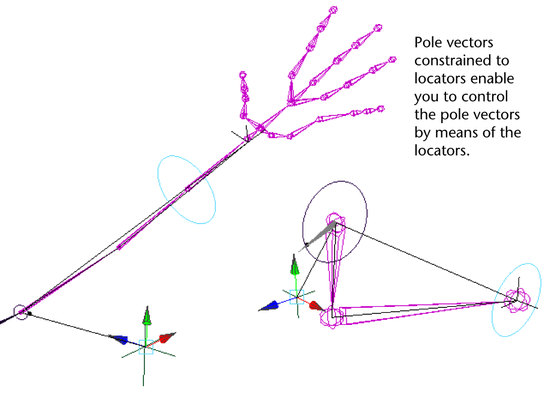
In character setup, the pole vectors of IK rotate plane handles for arm joint chains are often constrained to locators placed behind the character.

In general, you will want to constrain a pole vector so that the joint chain does not unexpectedly flip when you manipulate the IK rotate plane handle. Because flipping can occur when the handle vector approaches or intersects the pole vector, you should constrain the pole vector so that the handle vector is unlikely to cross it.
A constrained pole vector is a pole vector whose position is driven by the position of one or more target objects. The position of one or more target objects is called the target point.
The constrained pole vector’s end position is driven by the target point. However, you can offset the constrained pole vector’s end position from the target point. Offsetting the constrained pole vector’s end position from the target point can be useful in situations where you don’t want the local axis of the constrained pole vector to coincide exactly with the target point.
Keep in mind that the IK chain controlled by the pole vector’s IK rotate plane handle rotates when the target point moves. If you move the target object, the movement of the pole vector will cause the IK chain to rotate.
 Except where otherwise noted, this work is licensed under a Creative Commons Attribution-NonCommercial-ShareAlike 3.0 Unported License
Except where otherwise noted, this work is licensed under a Creative Commons Attribution-NonCommercial-ShareAlike 3.0 Unported License







