有关详细信息,请参见帮助 > 节点和属性参考(Help > Node and Attribute Reference)。
-
-
显示起始关节 IK 控制柄的关节链的名称。您可以单击“>”图标按钮打开起始关节的。
-
-
显示 IK 控制柄的末端效应器的名称。您可以单击“>”图标按钮打开末端效应器的。
-
-
启用该属性时,当前 IK 控制柄将捕捉回其末关节的位置。默认为启用。
-
-
如果该属性处于启用状态且当前 IK 控制柄没有任何关键帧,当您使用其他 IK 控制柄或通过直接平移、旋转或缩放关节来调整关节姿势时,当前 IK 控制柄将粘滞到其当前位置。如果该属性处于启用状态且当前控制柄上具有关键帧,则忽略。默认为。
当使用 IK 控制柄调整关节链的姿势以阻止不需要的关节链移动时,您可以使用。例如,如果在移动和调整模型髋部的姿势时希望脚稳固站立在地板上,您可以为模型腿部的 IK 控制柄启用。
-
-
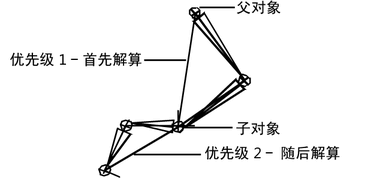
指定当前 IK 控制柄的优先级。仅在关节链具有多个 IK 控制柄时有用。旨在确保以正确的顺序解算关节链的 IK 控制柄,以便正确生成所需动画。
当您为关节链的 IK 控制柄设定时,Maya 根据每个控制柄在层次中的位置计算其优先级。为 1 的 IK 控制柄具有最高优先级并将首先旋转关节。为 2 的 IK 控制柄具有第二优先级并将随后旋转关节,依此类推。默认值为 1。
-
-
设定当前 IK 控制柄的权重值。
权重值,与 IK 控制柄的末端效应器及其目标之间的当前距离结合使用来排列以下项目的优先次序:当前 IK 链的解算、当前 IK 链的其他具有相同设置的 IK 控制柄的解算。请参见优先级。
当具有相同的两个或多个 IK 控制柄的末端效应器不能同时达到它们的目标时,首先解算末端效应器距离其目标最远并且权重最大的 IK 控制柄。
不适用于、或。
-
-
指定当前 IK 控制柄的末端效应器是否支持达到其目标的方向或位置。
如果将该属性设定为 1,则末端效应器将尝试达到 IK 控制柄的位置。如果将该属性设定为 0,则末端效应器仅尝试达到 IK 控制柄的方向。值为 0.5 指定末端效应器以同等程度尽可能达到位置和方向。默认值为 1.000。
不适用于或控制柄。
-
-
值为 0.000 表示将动画模式设定为纯 FK,值为 1.000 表示将动画模式设定为纯 IK。如果值是介于 0.000 和 1.000 之间的数值,则当前骨架上的动画采用混合的 IK 和 FK。请参见 IK/FK 混合。
注意
除了可以在多个帧上混合 IK 和 FK 动画之外,混合也可在单帧上发生。在单帧上混合会立即将 IK 切换为 FK 或将 FK 切换为 IK。
-
-
为 IK 控制柄指定解算器的类型。请参见 IK 解算器。默认选项如下所示:
-
-
-
-
-
-
指定极向量的结束点的位置。
极向量仅适用于使用旋转平面解算器的 IK 控制柄。请参见旋转平面解算器。
-
-
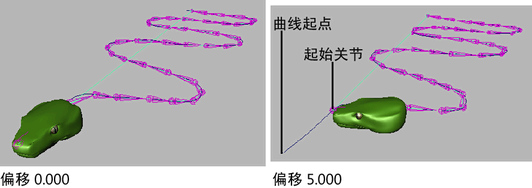
该属性仅适用于样条线 IK 控制柄和处于启用状态的情况。
设定 IK 链的起始关节的根从样条线 IK 曲线的开始处偏移的量。
-
-
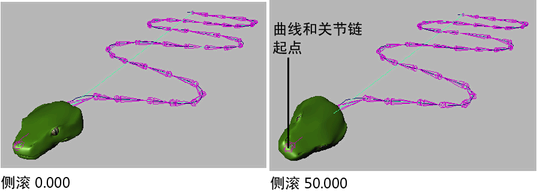
该属性仅适用于样条线 IK 控制柄。
从样条线 IK 控制柄的起始关节侧滚整个关节链。
-
-
-
-
该属性仅适用于样条线 IK 控制柄。
请参见 IK 样条线控制柄工具。
警告
如果在样条线 IK 控制柄的中禁用,解算器将忽略之前使用设置了关键帧的任何运动。设置关键帧时,要么禁用,要么启用,而不能同时处于这两种状态。
-
-
该按钮将显示当前控制柄的其他属性。
-
-
当该属性处于启用状态时,Maya 会将上方向向量约束应用于当前控制柄的关节链中每个关节的本地帧。
指定应用于控制柄的关节链中关节的上方向向量约束的类型。
-
-
-
-
将每个关节的设定为从该关节到指定对象的中心的方向。
在字段中键入对象的名称。
-
-
将第一个和最后一个关节的设定为从关节到指定开始和结束对象的中心的方向。
在和字段中键入起始关节和末关节上方向对象的名称。将沿链插入链的开始和结束的结果,用来为中间关节提供上方向向量。
-
-
将指定对象的局部空间中的特定向量设定为所有关节的。
在字段中键入局部向量,在字段中键入对象名称。的默认值是 (0,1,0)。这意味着该对象的正 Y 轴将用作。
-
-
将指定对象的局部空间中的特定向量设定为当前链中起始关节和末关节的。
在和字段中键入起始关节的局部向量和对象名称,在和字段中键入末关节的局部向量和对象名称。将沿链插入链的开始和结束的结果,用来为中间关节提供上方向向量。
-
-
将世界空间中的特定向量设定为所有关节的上方向向量。
在字段中键入世界空间上方向向量。
-
-
将世界空间中的特定向量设定为起始关节和末关节的上方向向量。
在字段中键入起始关节世界空间上方向向量,在字段中键入末关节世界空间上方向向量。将沿链插入链的开始和结束的结果,用来为中间关节提供上方向向量。
-
-
将设定为与在先前版本的 Maya(低于 Maya 5.0.1)中有相同行为。上方向向量约束不适用于链中的关节。
-
-
指定哪个局部关节轴与世界空间上方向向量对齐。正 Y 轴是默认设置。
如果您选择任一最近轴,则在每个关节处使用正轴还是负轴取决于当前哪个轴距离世界空间上方向向量比较近。选项允许您保留其轴每隔几个关节即翻转的关节链的方向。
注意
我们建议您不要将“最近”用于动画,因为这容易导致关节链中出现翻转。
-
-
当为或时,这些字段中的值将在指定上方向对象的局部空间中指定向量。
当为或时,这些字段中的值将指定世界空间世界向量。
字段适用于起始关节,字段适用于末关节。
-
-
当为、、或时,该字段中的名称将指定要用于计算上方向向量的对象。该字段中的名称将变换的世界空间矩阵与 IK 控制柄相连接。
字段适用于起始关节,字段适用于末关节。
设定附加的、用户定义的扭曲沿关节链分布的方式。
-
-
将附加的扭曲量应用到链中的末关节。扭曲以度为单位。
其余关节的扭曲值是在起始关节处从 0 开始插值的。使用的插值类型由属性确定。
-
-
将附加的扭曲量应用到链中的起始关节和末关节。扭曲以度为单位。
其余关节的扭曲值是使用由属性指定的插值类型插值的。
-
-
将纹理连接到属性,为整个链提供显式扭曲值。扭曲以度为单位。
为每个关节指定了 UV 纹理坐标 (0,j/N),其中 j 是链中的关节索引,N 是链中的关节数。由纹理返回的 Alpha 值乘以属性的值即得到每个关节的扭曲。
-
-
为链的起始关节和末关节指定扭曲值。仅当设定为时,这些字段可用。
-
-
通过连接到纹理沿链指定扭曲。仅当设定为时,该字段可用。
-
-
由于纹理通常返回 [0, 1] 范围内的值,该倍增可确保使用适当的范围映射扭曲值。仅当设定为时,该字段用可。
注意
属性适于与和属性一同使用,不会干扰或取代它们的功能。
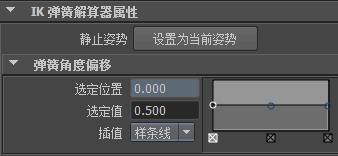
静止姿势设定弹簧 IK 关节链的基本外观。静止姿势还可确定如何沿弹簧 IK 关节链计算角度偏移。
默认情况下,静止姿势是创建 IK 控制柄时弹簧 IK 关节链的姿势(关节的方向和位置)。
-
-
将当前弹簧 IK 关节链的姿势设置为其 IK 控制柄的静止姿势。
-
-
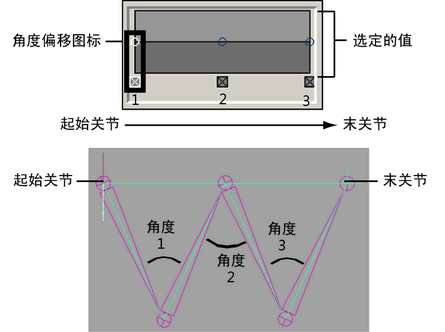
在渐变上显示角度偏移图标的位置。该字段为只读字段。
-
-
为选定的角度偏移图标指定偏移值。角度偏移是确定某关节相对于同一链中其他关节旋转速度的相对权重。角度偏移可用作倍增,以影响目标关节链中各骨骼之间的角度。
例如,如果关节链中第一个角度的为 1,该链第二个角度的为 0,则第一个角度的移动速度是第二个角度的两倍。
最小为 0,最大为 1。
-
-
该属性继承自 ramp节点并且不会对弹簧 IK 解算器产生任何影响。
-
-
显示当前弹簧 IK 关节链的角度偏移()与其目标角度(骨胳之间的角度)之间的关系。渐变上的图标表示当前弹簧 IK 关节链的。渐变上的这些图标的位置通过以下方式确定:
- 在垂直轴上,图标的当前角度偏移()。
- 在水平轴上,弹簧 IK 关节链中骨骼间角度的出现顺序(从起始关节到末关节)。
例如,对于具有五个关节的弹簧 IK 关节链,将在上显示三个图标。沿渐变的水平轴的第一个图标表示距离弹簧 IK 关节链的起始关节最近的目标角度的。
 时,“扭曲类型”(Twist Type)、“根在曲线上”(Root On Curve)和“根扭曲模式”(Root Twist Mode)可用。请参见 IK 样条线控制柄工具。
时,“扭曲类型”(Twist Type)、“根在曲线上”(Root On Curve)和“根扭曲模式”(Root Twist Mode)可用。请参见 IK 样条线控制柄工具。