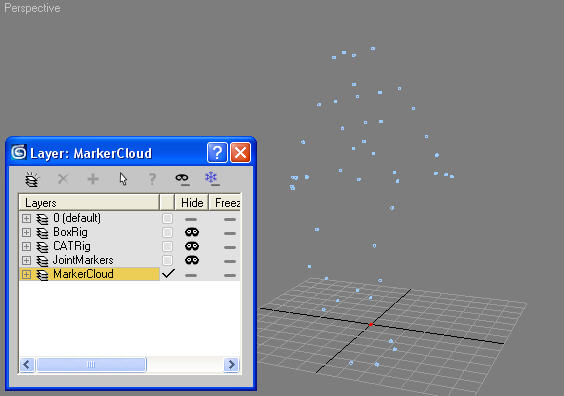
If you are working with motion-capture data and would like to bring point-cloud data into 3ds Max and then map the motion onto a CATRig, this topic might help. Rather than a tutorial, this is an example of how to solve this problem. No scripting was used to configure this system. Please download the file and look at the solution. It may give you ideas on how you can solve your own motion mapping problems.
This is an exercise in configuring constraints to solve a complex integrated problem. Constraints are directional. In other words, if A is constrained to B, then B cannot reference A. The inability of constraints to support circular relationships means that we are forced to take a layered approach to the problem.
The desired result is a set of bones with correctly animated joint positions and rotations. One simple way to solve this problem is to break the problem into two simpler problems, positions and rotations, and solve them separately. The postion of a bone does not depend on any other bones in the skeleton, nor does it depend on the rotation of any other bone.
3ds Max CAT simplifies the solution to this problem.
The following illustrations depict the process of mapping a CATRig to imported point-cloud data.
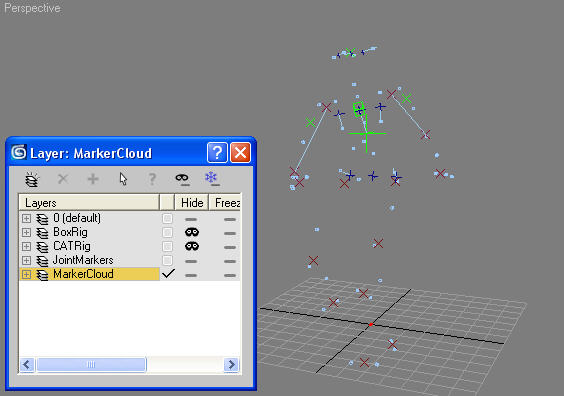
The first layer is for generating joint positions in the cloud using Point constraints. The joint positions are simply weighted Position constraints, and therefore relatively easy to set up. The red crosses in the scene file represent basic joint position helpers.
A group of three Point helpers is used to define the pelvis orientation based on surrounding markers. An identical setup is used to drive the orientation of the ribcage and head. These are the blue points in the illustration.
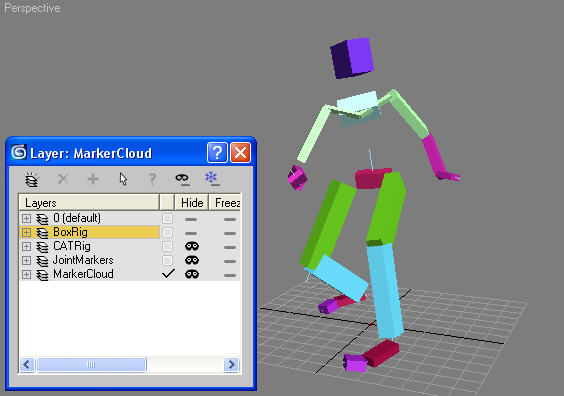
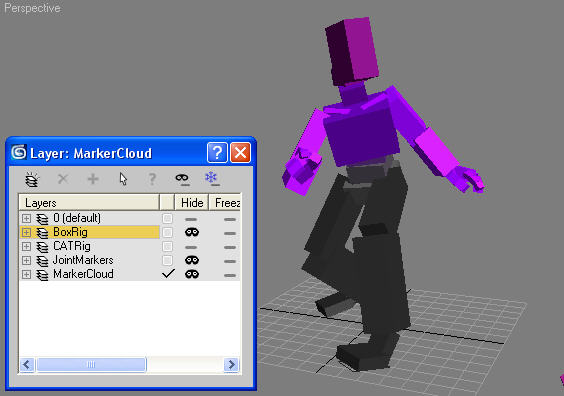
The second layer is the BoxRig, which defines the joint angles. Boxes are constrained to the joint positions and LookAt controllers define rotations. Note that the exact position of many of the bones is not important. For example, the knee joints move relative to the hip bone, but when this data is mapped onto the CATRig, the latter’s IK system effectively cleans up the motion and locks the joint locations.