Command entry:
Command entry:Make a selection.


Hierarchy panel
IK
Sliding and Rotational Joints rollouts
In inverse kinematics, joints operate by allowing motion on one or more axes and restricting motion on the remaining axes.
You set whether an object can move (slide) on or rotate about a given axis with the Active check box in the joint rollouts.
Joints have a maximum of six possible axes: three for position and three for rotation. You constrain the motion of a joint
by setting which axes are active.
The setting of IK joint axes overrides any Inherit and Lock settings in Link Info.
Procedures
To activate or deactivate an axis:
-
 Select an object.
Select an object.
- On the Hierarchy panel, click IK.
- Expand the rollout for a joint type.
- Turn on Active for any available axis.
- When on, the axis is active and the object can move or rotate about that axis.
- When off, the axis is inactive and the object cannot move or rotate about that axis.
To limit a joint:
- Select an object.
- On the Hiearchy panel, click IK.
- Turn on Limited for any active axis. If an axis is inactive the limits settings are ignored.
- When on, the axis is limited and the object can move or rotate within the range set by the From and To fields.
- When off, the axis is not limited and the object moves or rotates freely about that axis. If you turn on Limited, specify
limit values in the From and To fields. When setting limits, the object transforms to the position or rotation defined by
the From or To field. When you exit the field or release the spinner, the object returns to its original position. You can
also view joint limits in the viewport by pressing and holding the mouse button on the From or To label of a limit field.
The object will move or rotate to the limit value until you release the mouse button.
Interface
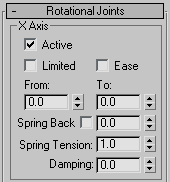
Sliding/Rotational Joints rollouts
The Sliding Joints rollout and Rotational Joints rollout contain similar controls for position and rotation, respectively.
Also, each rollout contains identical group boxes for control of the X, Y, and Z axes.
X/Y/Z Axis groups
- Active
-
Activates an axis (X/Y/Z). Allows the selected object to slide on or rotate about the activated axis.
- Limited
-
Limits the range of motion or rotation allowed on an active axis. Use in conjunction with the From and To spinners. Most joints
are limited in their range of motion along an active axis. For example, a piston slides only within the length of its cylinder.
- Ease
-
Causes a joint to resist motion as it approaches its From and To limits. Simulates an organic joint, or worn mechanical joint,
moving or rotating freely in the middle of its range of motion but moving less freely at the extremes of its range.
- From and To Spinners
-
Determine for position and rotation limits. Use in conjunction with the Limited function.
- Spring Back
-
Activates Spring Back. Each joint has a rest position. As the joint moves further from the rest position, an increasingly
larger force pulls the joint back to its rest position, like a spring.
- Spring Back (spinner)
-
Sets the rest position for the joint. For rotational joints, this is the orientation of the joint in degrees; for sliding
joints, it's the position in units. Adjusting this is similar to adjusting the From/To spinners. You see the orientation/position
while performing the adjustment, but when you release the spinner the object returns to its previous state.
If you're using the HD Solver, you must turn on Show Initial State (Motion panel IK Controller Parameters rollout) to see the effect on the geometry during the adjustment .
- Spring Tension
-
Sets the strength of the "spring." Higher values cause the spring to pull harder as the joint moves further from its rest
position. A setting of 0 turns off the spring; very high settings can turn the joint into a limit because you can reach the
point where the spring is too strong to allow the joint to move past a certain point.
- Damping
-
Applies resistance over a joint's full range of motion or rotation. Simulates the natural effect of joint friction or inertia.
As a joint corrodes, dries out, or is put under a heavy load, it resists motion along its active axes.