数種類の光学式モーション キャプチャ システムがありますが、それらは基本的には同じように動作します。それぞれの装置では、一連のカメラを異なるアングルに配置して、パフォーマに取り付けた反射センサの位置を追跡します。
誰か他の人によってキャプチャされた光学式データ ファイルを使用する場合でも、光学式データの基本を理解しておくと役に立ちます。
光学式データとは、一組の移動データです。このデータは、多くの異なるポイントから構成されていますが、移動データだけで回転またはスケールのデータは含まれません。
ラベルなしマーカの位置を決めるための回転データを抽出するには、少なくとも 3 個以上のセンサを集合したリジッド ボディを作成します。センサは中身のあるボディ部分を定義します。たとえば、多くの光学式キャプチャ設定では 4 個のマーカで頭部を定義します。

頭部のリジッド ボディを定義する、選択された 4 個のマーカ
頭部に名前を付けると、一部のセンサは上に移動し、その他のセンサは下に移動します。4 個の光学式マーカをリジッド ボディとしてグループ化すると、このグループの移動は回転として認識され、リジッド ボディの中央にあるマーカによって示されます。
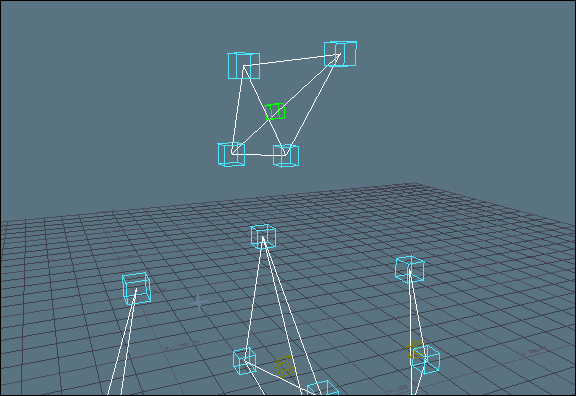
回転を示す中央のリジッド ボディ マーカ
またリジッド ボディは、オクルージョンと部分的なオクルージョンを補正する重要な部分でもあります。閉じているまたはラベルなしマーカが他の光学式マーカと接続されているため、光学式装置はリジッド ボディ内の別のマーカに基づいて覆い隠されたマーカの位置を計算しようとします。しかしこの計算は十分に正確なものではなく、手動で補正する必要が生じる場合があります。





